【2025年4月】衛星データ利活用に関する論文とニュースをピックアップ!
2025年4月に公開された衛星データの利活用に関する論文の中でも宙畑編集部が気になったものをピックアップしました。
・Wetland shrinking and dust pollution in Khuzestan Iran: insights from sentinel-5 and MODIS satellites
(イラン南西部のフーゼスターン州における、湿地帯の縮小とエアロゾル(PM10,PM2.5等)汚染の増加関係に関する分析手法)・A simultaneous EEG and eye-tracking dataset for remote sensing object detection
(リモートセンシング画像における物体検出の際の脳波に関する世界初の公開データセット)・VCDFormer: Investigating cloud detection approaches in sub-second-level satellite videos
(衛星動画における雲の検出(Video Cloud Detection, VCD)のための新しいトランスフォーマーベースのモデル「VCDFormer」の提案)・Himawari-8 satellite detection of morning terrain fog in a subtropical region
(亜熱帯地域における、朝の地形霧をひまわり8号の衛星データを用いて検出するアルゴリズム手法)
宙畑の新連載「#MonthlySatDataNews」では、前月に公開された衛星データの利活用に関する論文やニュースをピックアップして紹介します。
実は、本記事を制作するために、これは!と思った論文やニュースをTwitter上で「#MonthlySatDataNews」「#衛星論文」をつけて備忘録として宙畑編集部メンバーが投稿していました。宙畑読者のみなさまも是非ご参加いただけますと幸いです。
Detection and Characterization of Marine Ecotones Using Satellite-Derived Environmental Indicators https://t.co/fdQSAfUNQM #mdpiwater @Water_MDPIより #衛星論文
複数の環境指標を組み合わせることで、水温・塩分・生物分布などの環境条件が急激に変化する海洋遷移帯をより正確に特定
— たなこう (@octobersky_031) April 2, 2025
Detection and Characterization of Marine Ecotones Using Satellite-Derived Environmental Indicators https://t.co/fdQSAfUNQM #mdpiwater @Water_MDPIより #衛星論文
複数の環境指標を組み合わせることで、水温・塩分・生物分布などの環境条件が急激に変化する海洋遷移帯をより正確に特定
— たなこう (@octobersky_031) April 2, 2025
Detection and Characterization of Marine Ecotones Using Satellite-Derived Environmental Indicators https://t.co/fdQSAfUNQM #mdpiwater @Water_MDPIより #衛星論文
複数の環境指標を組み合わせることで、水温・塩分・生物分布などの環境条件が急激に変化する海洋遷移帯をより正確に特定
— たなこう (@octobersky_031) April 2, 2025
それではさっそく2025年4月の論文を紹介します。
Wetland shrinking and dust pollution in Khuzestan Iran: insights from sentinel-5 and MODIS satellites
【どういう論文?】
・本論文は、イラン南西部のフーゼスターン州における湿地帯の縮小と粉塵(PM10,PM2.5等)汚染の増加の関係を分析する手法を提案する
【技術や方法のポイントはどこ?】
◾️本研究のアプローチ
・湿地帯の面積変化と粉塵発生頻度の直接的な関係を、NDWI(正規化水指数)とDust Event(粉塵イベント)データを組み合わせて分析するという手法を取り入れること
・Google Earth Engine(GEE)を活用してMODIS衛星データを処理し、粉塵イベントの頻度画像を生成する可視化に取り組むこと
・湿地帯の縮小と粉塵汚染強度の直接的な関連性を示し、湿地帯の面積縮小とPM10/PM2.5汚染日数増加の定量的な関係を明らかにすること
◾️データセット
①衛星データ
[MODIS衛星データ]
・AOD(エアロゾル光学的厚さ)値が0.8を超える日を「粉塵イベント」と定義し、Dust Event指数として利用する
・NDWI(Normalized Difference Water Index:正規化水指数)の計算にも利用する
[Sentinel-5衛星データ]
・AAI(Absorbing Aerosol Index:吸収エアロゾル指数)のために利用する
・上記指数は、Dust Event指数とは別の指数である
②地上観測データ
・フーゼスターン州の23の大気汚染モニタリングステーションからのPM2.5およびPM10濃度データ
・風向・風速データ
◾️技術的特徴
①指標
[NDWI(正規化水指数)]
・湿地帯の水域面積を特定するために使用する
・NDWI = (Green – NIR) / (Green + NIR)
・水域判定の閾値として0.3を採用する
[AOD(エアロゾル光学的厚さ)]
・大気中の浮遊粒子(エアロゾル)による光の吸収・散乱を測定する指標
・粉塵汚染レベルのモニタリングに使用する
・今回は”AOD値>0.8”を粉塵イベントの特定基準として使用する
[AAI(吸収エアロゾル指数)]
・UV放射を吸収する上昇エアロゾル層の定性的指標である
・数値が高いほど深刻な汚染を示す
②分析方針
・衛星データ(AODとAAI)と地上観測データ(PM10とPM2.5)の相関分析を行う
・湿地帯面積と粉塵イベントの関係を検証する
・湿地帯面積とPM濃度の関係を検証する
【議論の内容・結果は?】
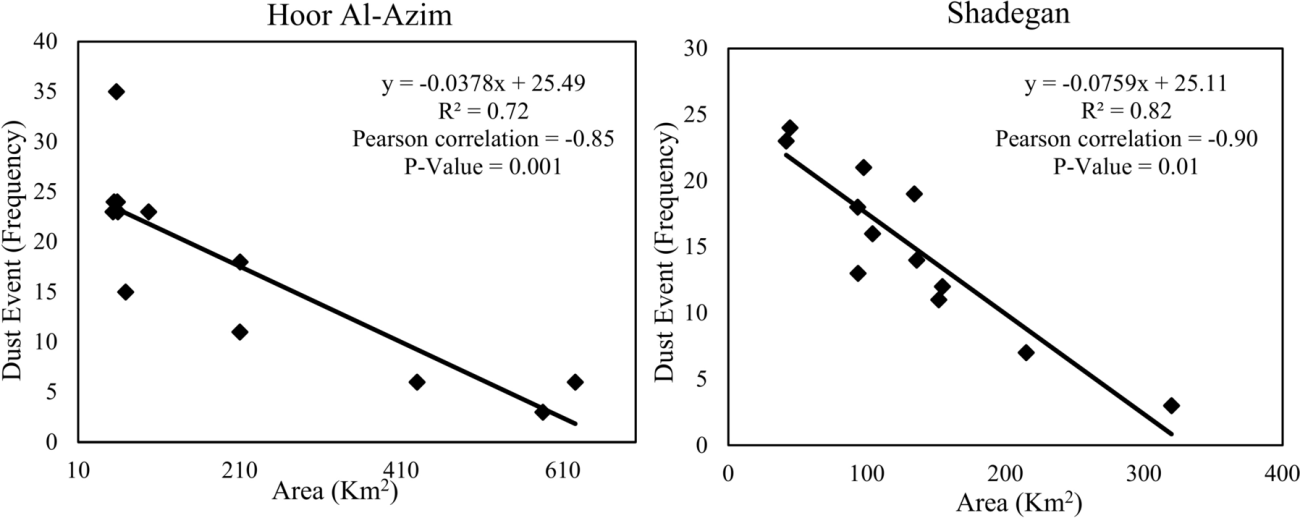
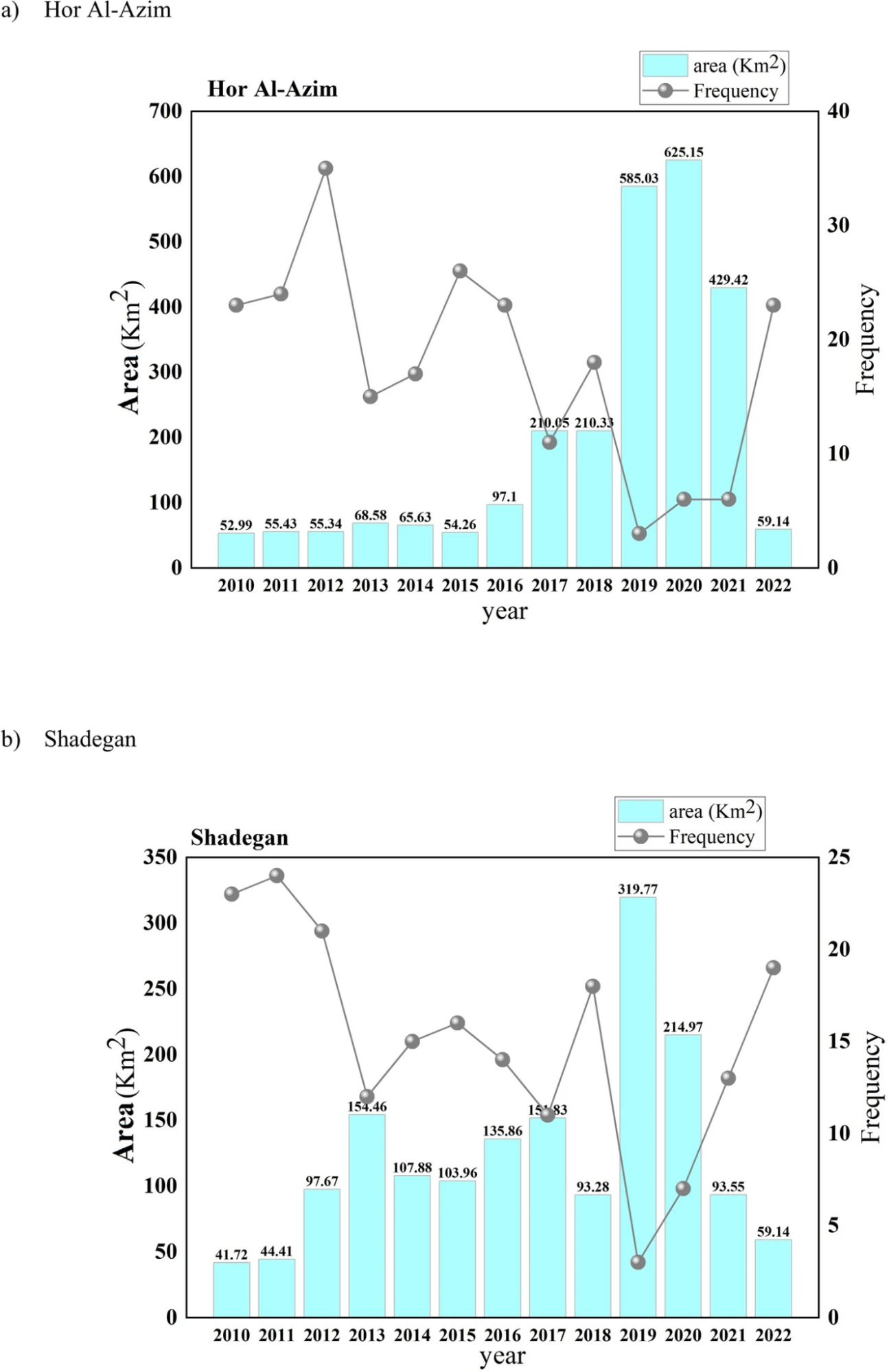
◾️湿地帯面積と粉塵イベントの関係
①ホールアルアジム湿地帯
・Pearson相関係数:-0.85
・R²:0.72(変動の72%を説明)
・湿地帯面積400km²の場合の粉塵イベント: 10回未満/年
②シャデガン湿地帯
・Pearson相関係数:-0.90
・R²:0.82(変動の82%を説明)
・湿地帯面積200km²の場合の粉塵イベント: 10回未満/年
・湿地帯面積>300km²の場合の粉塵イベント: 5回未満/年
③定量的発見
・ホールアルアジム湿地帯:60km²以下で粉塵イベント急増
・シャデガン湿地帯:100km²以下で粉塵イベント急増
・上記2点の値は「環境臨界点(environmental tipping point)」として考えることができる
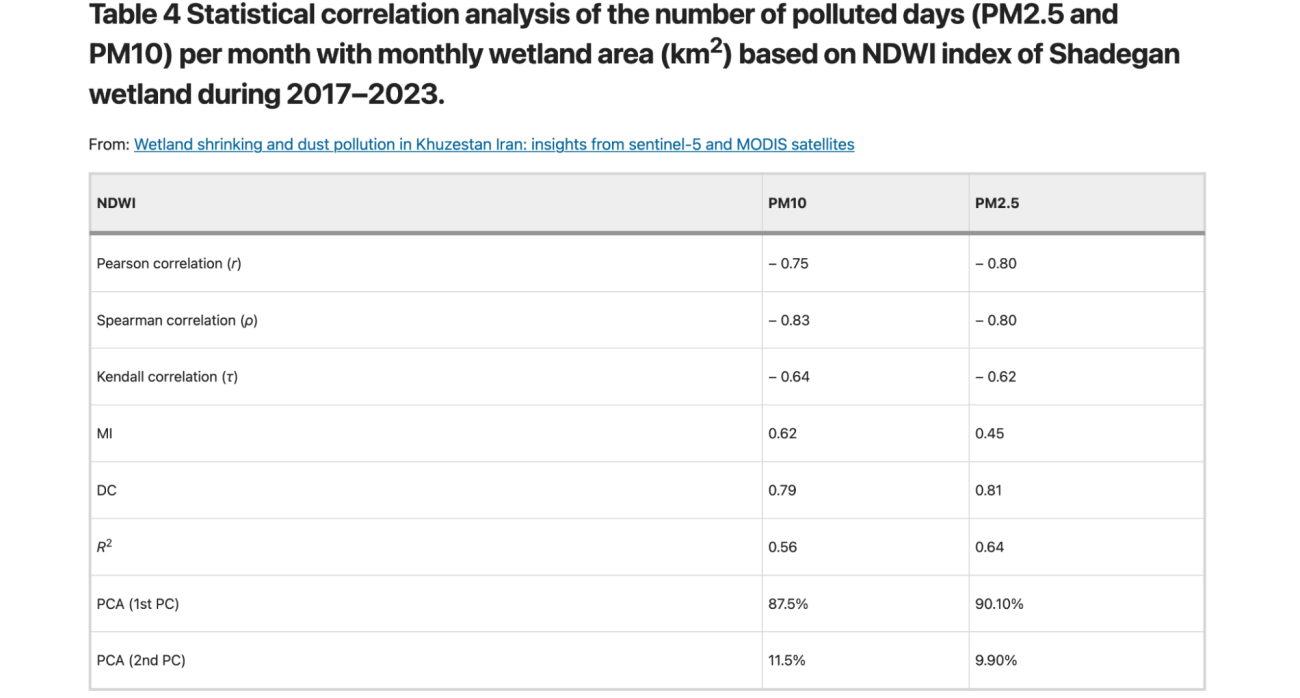
◾️湿地帯面積とPM汚染の関係(シャデガン湿地帯)
①PM10による影響
・Pearson相関係数:-0.75
・R²:0.56(変動の56%を説明)
・湿地帯面積400km²:月10日未満の汚染日
②PM2.5による影響
・Pearson相関係数:-0.80
・R²:0.64(変動の64%を説明)
・湿地帯面積500km²:月5日未満の汚染日
③定量的示唆
・PM2.5:湿地帯面積1km²減少ごとに月間汚染日数0.05日増加
・PM10:湿地帯面積1km²減少ごとに月間汚染日数0.03日増加
・PM2.5(より微小な粒子)からの影響がより大きそう
#MODIS #Sentinel5 #GoogleEarthEngine #NDWI #AOD #AAI #湿地帯保全 #粉塵汚染 #エアロゾル #PM10 #PM2.5 #ダストイベント
A simultaneous EEG and eye-tracking dataset for remote sensing object detection
【どういう論文?】
・EEGET-RSOD(EEG and Eye-Tracking dataset for Remote Sensing Object Detection)という、脳波(EEG)と視線追跡(eye-tracking)データを同時に記録した、リモートセンシング画像における物体検出のための世界初の公開データセットに関する論文である
【技術や方法のポイントはどこ?】
◾️概要
・38人のリモートセンシング専門家が1,000枚のリモートセンシング画像から特定の物体(航空機)を限られた時間内に探し出すというタスクにてデータを収集する
◾️詳細
・衛星画像観察時の視線データとEEGデータをキーボード入力時刻で同期する
・最終的なデータ種類としては、raw EEGデータ、前処理済みEEGデータ、視線追跡データ、データ整合ファイル、顕著性マップ、衛星画像、物体アノテーションデータが得られる
◾️検証内容
・物体検出率:衛星画像中の航空機検出成功率(事前にセットしたラベルと視線の一致度)
・固定の安定性:衛星画像観察時の注視パターン分析
・固定点分布の一貫性:同じ衛星画像に対する参加者間での注視位置の類似度
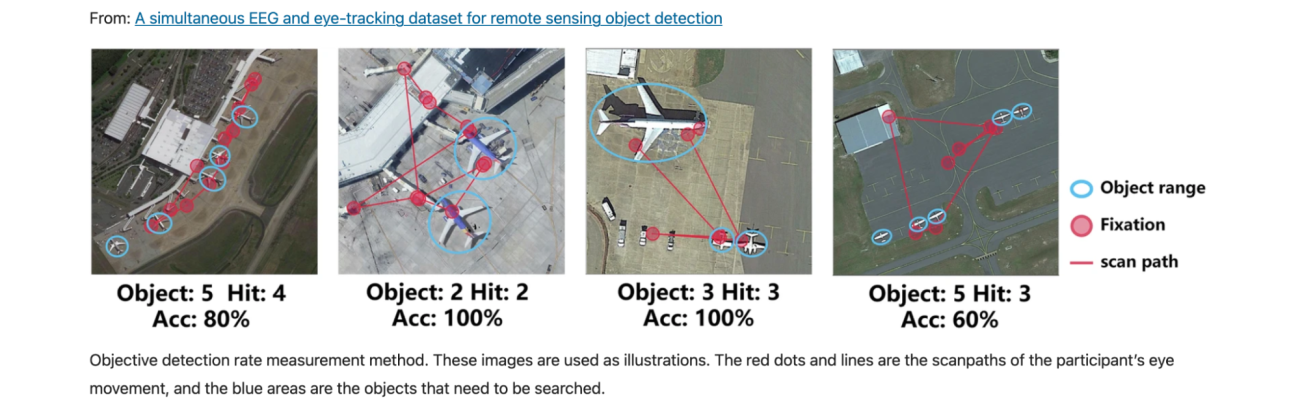
【議論の内容・結果は?】
・平均物体検出率:90.11%(衛星画像中の航空機を高精度で検出)
・”航空機なし衛星画像”では注視時間が長く、サッカード振幅が大きい(視線が色々なところに行き来する)
・”航空機あり衛星画像”では方向性のある視線軌跡、なし画像では体系的探索パターンが見られた
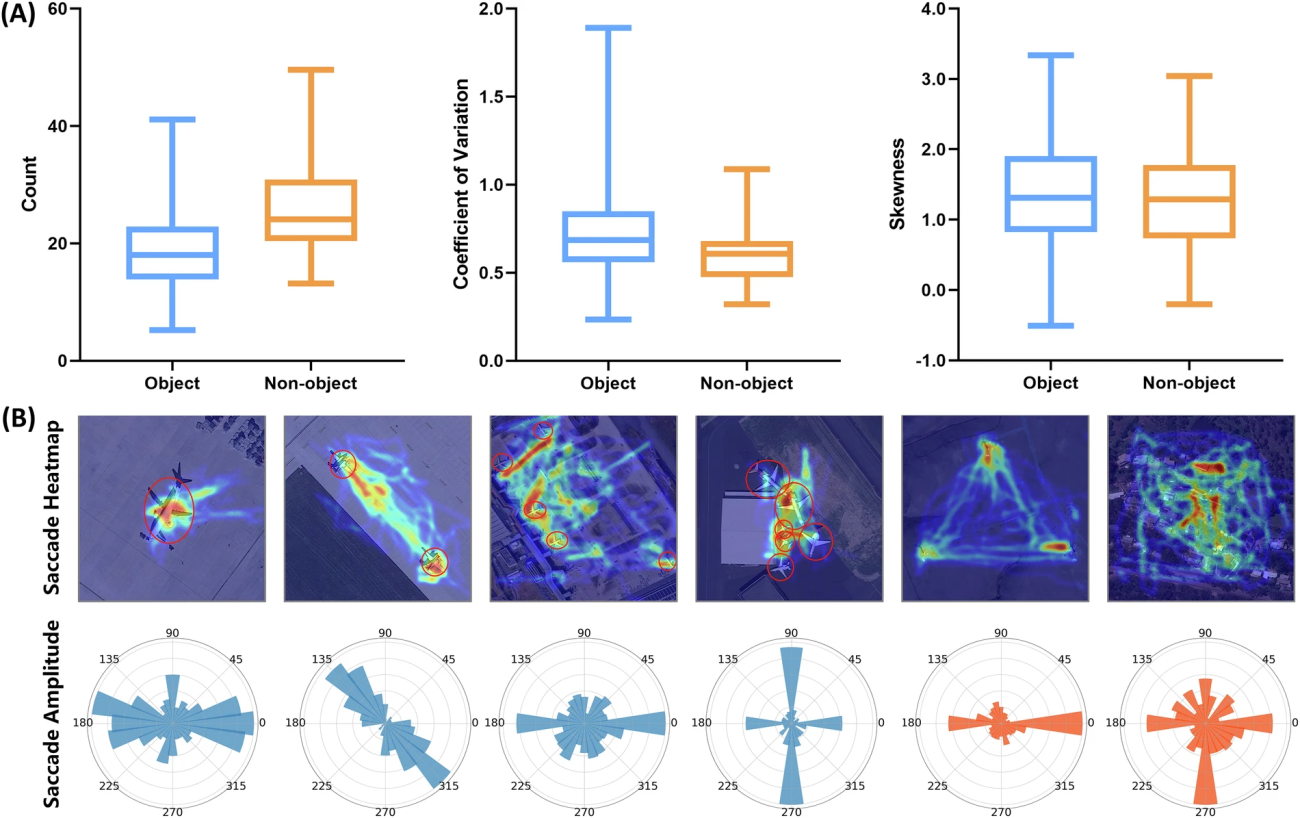
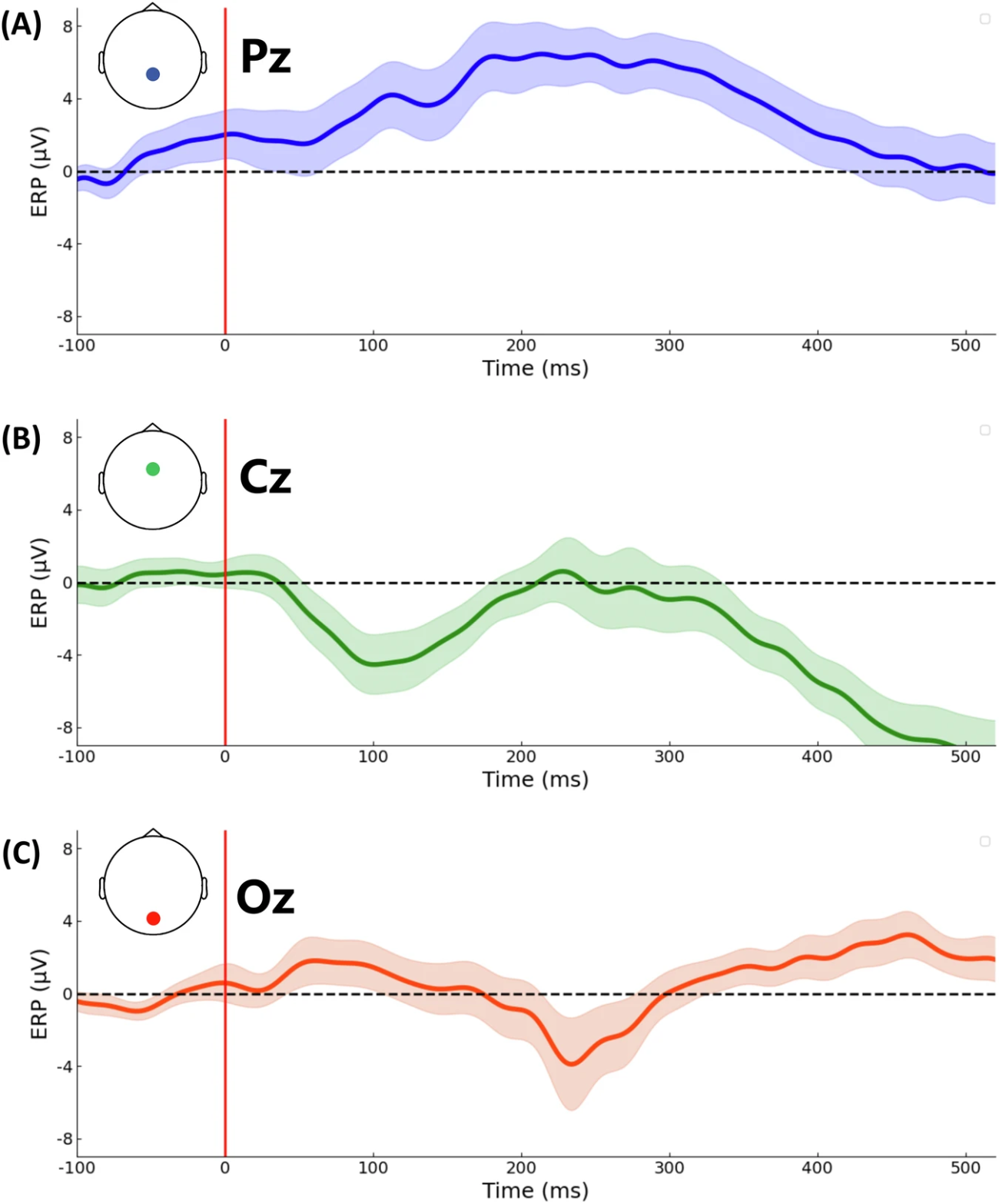
・また、衛星画像観察時には、Pzチャンネル(頭頂部)で顕著なP300成分というものを観察することができた
※P300成分・・・刺激が提示されてから約0.3秒後に現れる脳波であり、注意(Attention)と関連すると考えられている
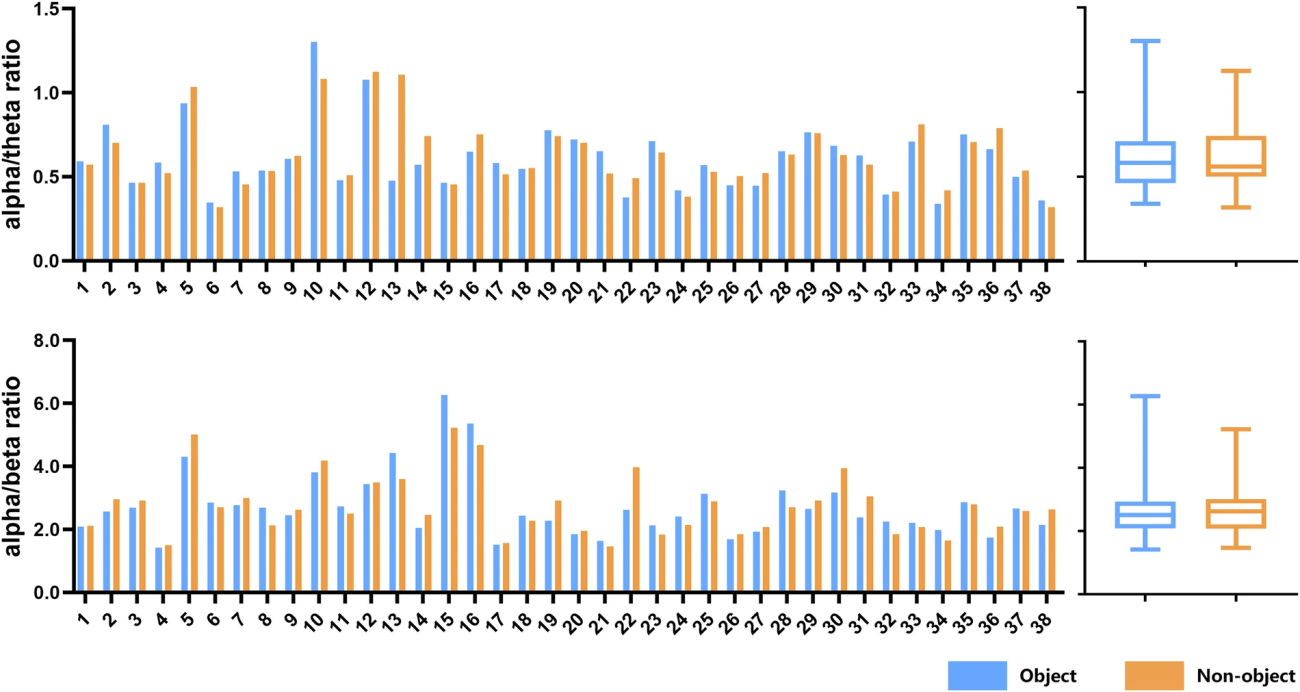
・なお、航空機ありとなしの衛星画像間では、特に認知負荷に有意差はなかった。
#EEGET-RSOD #物体検出 #EEG #視線追跡 #脳波 #航空機検出 #視覚的注意
VCDFormer: Investigating cloud detection approaches in sub-second-level satellite videos
【どういう論文?】
・本論文は、サブ秒レベルの高時間分解能衛星動画を対象とし、特に薄雲の識別や高反射領域からの干渉が問題となる複雑な観測条件下での雲の検出(Video Cloud Detection, VCD)のための新しいトランスフォーマーベースのモデル「VCDFormer」を提案する
【技術や方法のポイントはどこ?】
◾️本研究のアプローチ
・Landsat-8衛星が撮影した「巻雲バンド」から雲の画像を切り取る
・静止画の雲を動かすために、「どこ(h,w)にあるか」と「どう動く(mh,mw)か」、そして「雲の濃さはどうか」という6つのパラメータを設定する
・アニメーションのコマ撮りのように、少しずつ雲を移動させて動きをシミュレートする
・正解データ(グラウンドトゥルースマスク)を白黒の画像(二値化画像)として作成
・既存の衛星動画から「雲のない場面」を選び、そこに作った動く雲(シミュレート結果)を重ね、きれいな背景に雲を合成する
◾️データセットの中身
・訓練用: 189シーン(各100フレーム)の雲のある動画
・テスト用: 18本の動画(各100フレーム)、合計1,800画像
◾️利用モデル(VCDFormer)
・VCDFormerはT-フレームのビデオシーケンス(RGB画像の連続)を入力とし、階層的なアーキテクチャで情報を処理する
・重要なモジュールの1つである強化時間シフトモジュール(ETSM)は、時間次元で特徴チャンネルをシフト(前方・後方)しながら、異なる時間フレームの情報を特徴マップ内で混ぜ合わせ、時間的パターンが捉えることができる
・過去の研究でも、薄い雲の検出と高反射地表面(建物の屋根など)との区別において特に効果を発揮している
【議論の内容・結果は?】
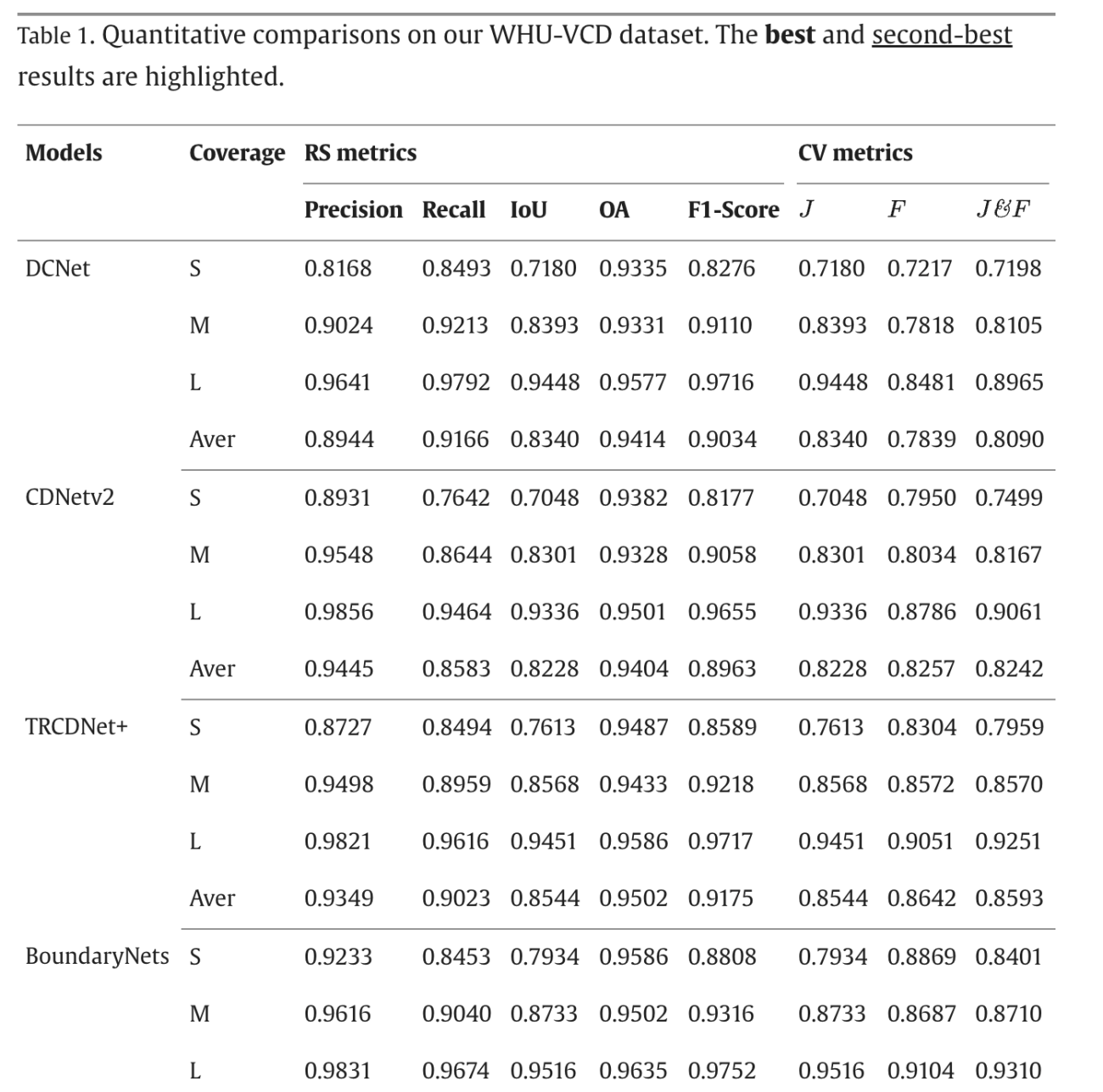
◾️性能比較における優位性
・VCDFormerは、他の最先端手法と比較して、すべての評価指標において最高の性能を達成した
– 平均IoU:0.9532(2位のIsomerは0.9251)
– 平均F1スコア:0.9756(2位のIsomerは0.9601)
– 平均Precision:0.9731(2位のIsomerは0.9638)
– 平均Recall:0.9783(2位のIsomerは0.9566)
・また、雲のカバレッジ別でも優位性を示し、小カバレッジ(薄い雲が多い)シナリオにおける性能向上が最も顕著であった
– 小カバレッジ:IoU 0.9274(2位のIsomerは0.8823)
– 中カバレッジ:IoU 0.9498(2位のIsomerは0.9220)
– 大カバレッジ:IoU 0.9824(2位のIsomerは0.9710)
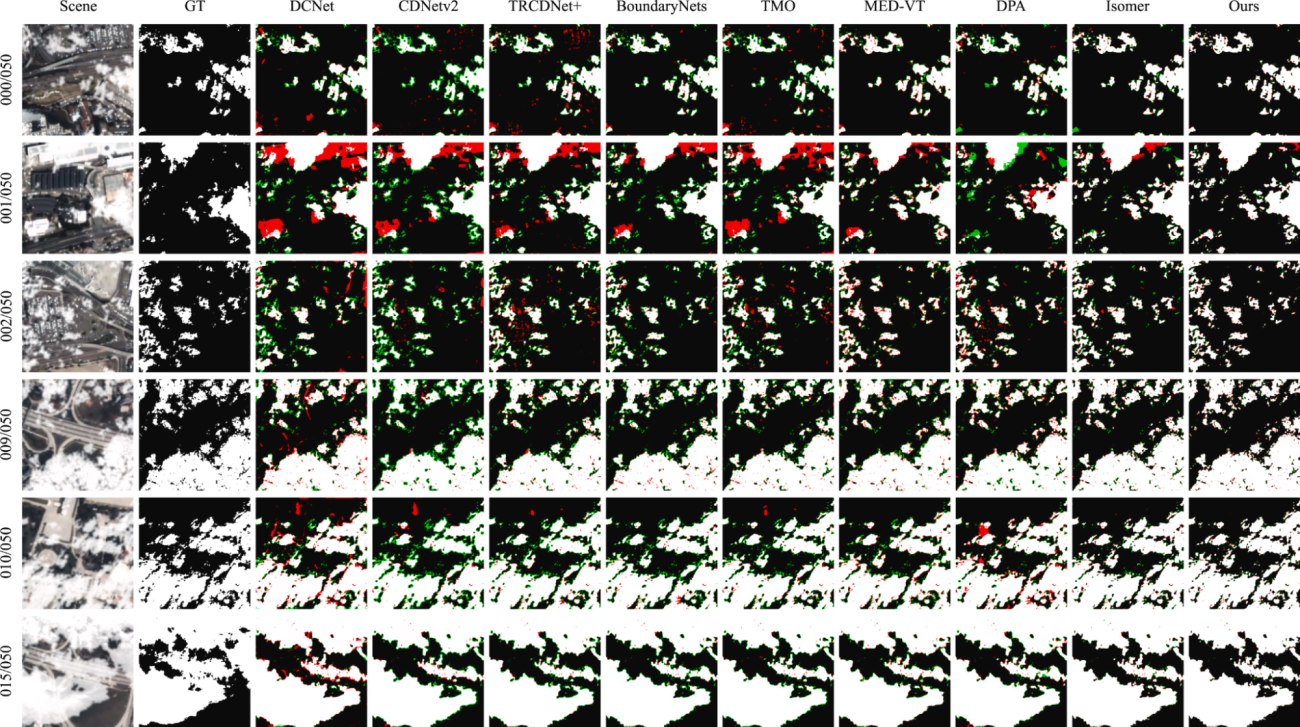
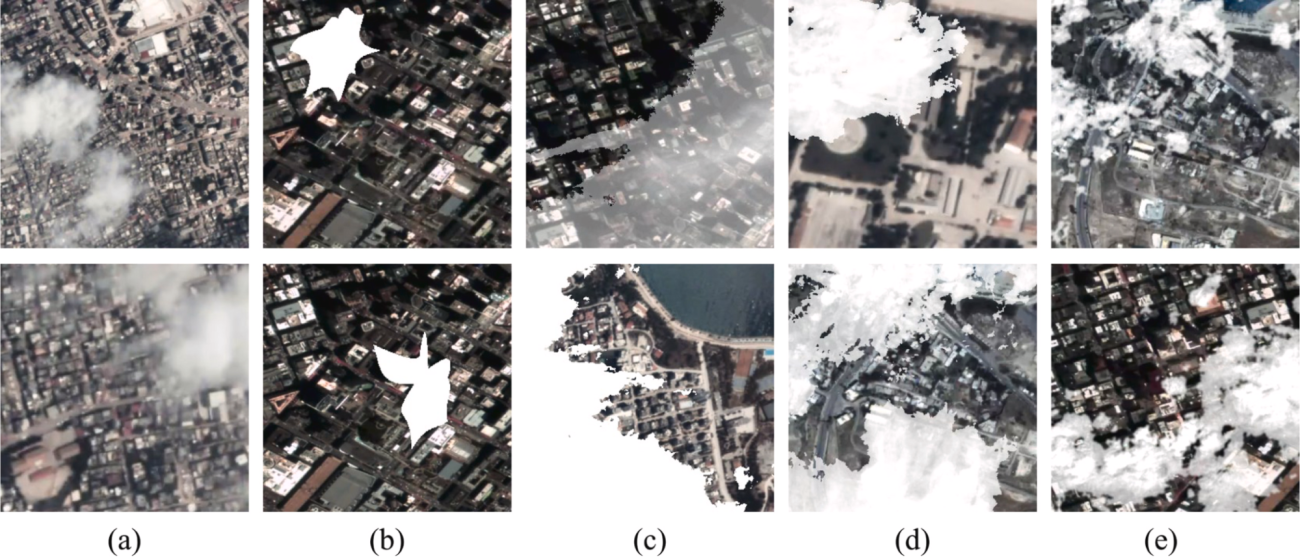
・以下は(高反射な建物などを含む)複雑な環境下での比較画像結果である
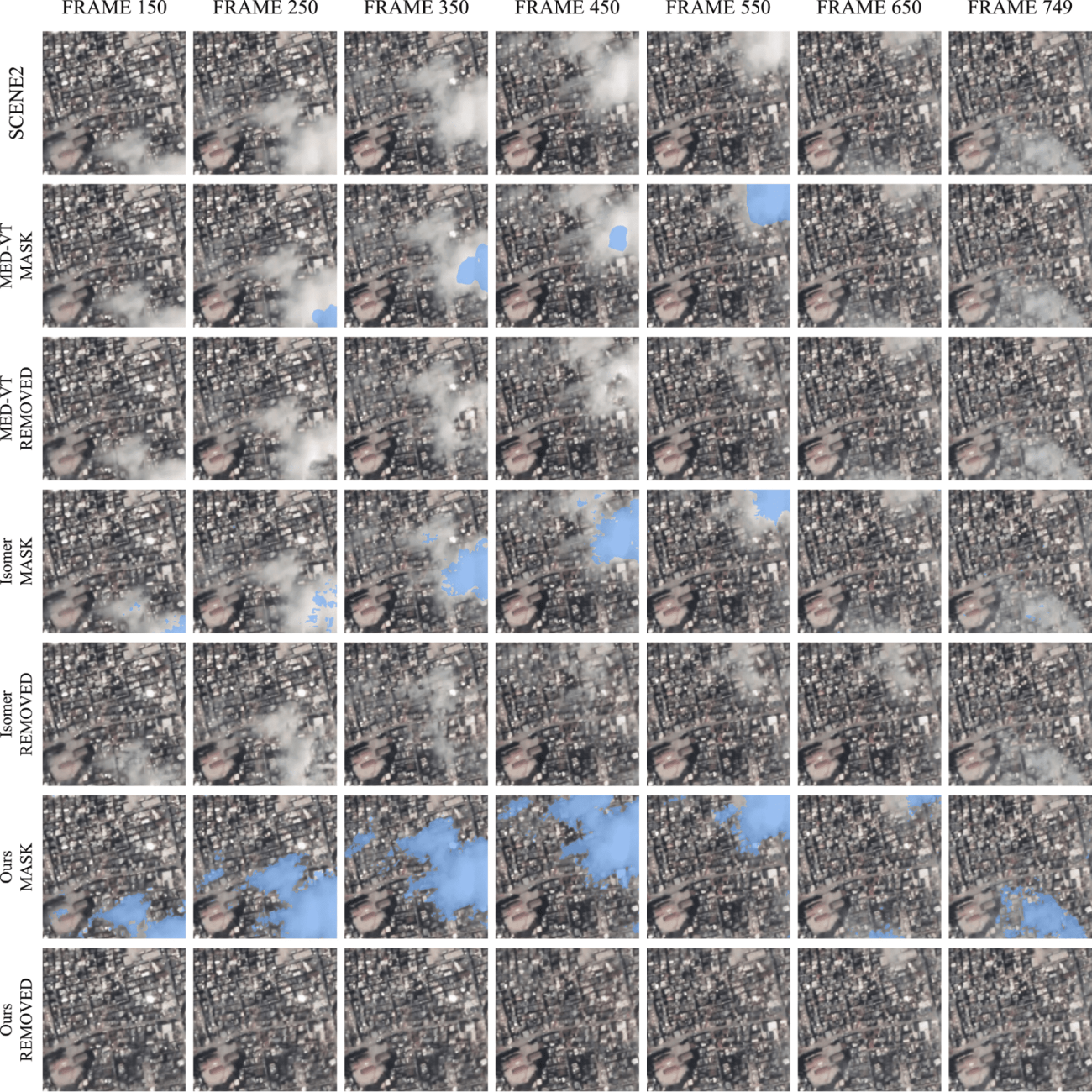
・雲除去タスクにおいても、正確な雲マスクが雲除去の品質向上に貢献する可能性を示した
#VCDFormer #WHU-VCD #雲カバレッジ #雲 #雲検出
Himawari-8 satellite detection of morning terrain fog in a subtropical region
【どういう論文?】
・本論文は、亜熱帯地域における、朝の地形霧(山や丘などの地形の影響を受けて発生する霧)をひまわり8号の衛星データを用いて検出するアルゴリズムを提案する
【技術や方法のポイントはどこ?】
◾️前提
・地形霧は、地域によっては交通安全や農業に大きな影響を与える要素である
◾️先行研究の課題
・地上の気象観測所に依存しているが、山岳地域では観測所の分布がまばらなため、広域でのリアルタイムの霧検出が困難
・朝の時間帯は太陽が地平線近くにあるため、衛星から見える霧と地表面の「色の違い」がとても小さく、霧と晴天地表面のスペクトル差が小さい
・特に山岳地帯での地形霧は、地表面の反射が霧を部分的に透過して混合信号になるため区別が困難
(山の霧は薄いことが多く、地面の模様が霧を通して見えてしまうため、衛星からは「霧+地面」の混ざった情報が届き、純粋な霧だけを見分けるのが難しい)
・亜熱帯地域の丘陵地には低層の雲が多く、霧との類似性がさらに検出を更に困難にしている
(霧と低い雲は、見た目も成分も似ている)
◾️本研究のアプローチ
・時系列の輝度温度差分を用いて、弱い霧信号を地表面から分離させ、霧が消えた後の地表面を誤って「動くもの」と判断してしまうリスクを最小化する
※輝度温度差分・・・輝度温度とは、物体から放射される赤外線の強さを人工衛星が観測して「温度」として表現したものであり、輝度温度差分とは「中赤外線で測った輝度温度」と「熱赤外線で測った輝度温度」の差分である
・また、低層雲除去指標(特定の赤外線波長での熱の出し方の「比率」)を用いて、低層の雲と中高層の雲を取り除く
・一部の低層雲は動きや熱特性が霧と似ており、上記の方法でも区別できないケースがあるため、隣接画像の比率を用いて、複雑なテクスチャを持つ中高層の雲や速い動きの低層の雲を除去する
◾️データセット
①ひまわり8号の衛星データ
・ひまわり8号衛星に搭載されたAHI imagerによって取得されたデータ
・時間分解能は10分
・空間分解能は2km
・AHIの16バンドのうち、霧検出に適した8つのバンド(0.51 μm, 3.9 μm, 8.6 μm, 9.6 μm, 10.4 μm, 11.2 μm, 12.3 μm, 13.3 μm)を選択
②中国気象局の地上観測所データ(検証用データ)
・時間分解能は3時間
・早朝8:00 (中国北京時間) の303の地上観測所の観測データを使用
・記録されている情報は、視程(visibility)、気温、風速、その他の情報
・霧の判定基準として、視程が1km未満の天候を霧とする
【議論の内容・結果は?】
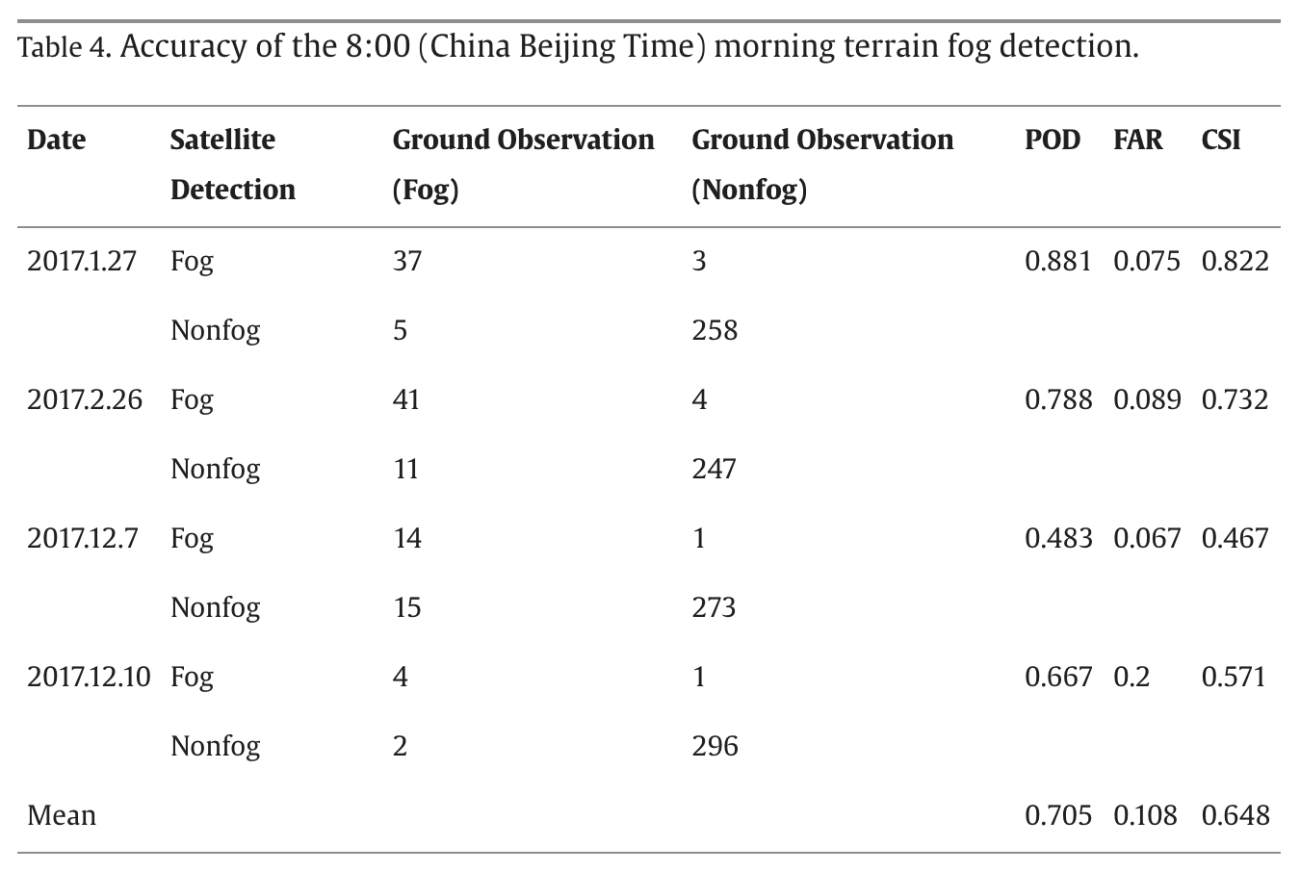
◾️検証結果
①POD(検出確率/Probability of Detection)指標
・ 0.705
・「実際に霧がある場所のうち、どれだけの割合を正しく霧として検出できたか」を示す指標で、値が1.0に近いほど「見逃し」が少なく、実際の霧を高い確率で検出できていることを意味する
②FAR(誤警報率/False Alarm Ratio)指標
・0.108
・「霧と検出した場所のうち、実際には霧がなかった場所の割合」を示す指標であり、
値が0.0に近いほど「誤検出」が少なく、アルゴリズムの信頼性が高いことを意味する
③CSI(重要成功指数/Critical Success Index)指標
・0.648
・「正検出、見逃し、誤検出のすべてを考慮したときの、アルゴリズムの総合的な成功率」を示す指標であり、PODとFARの両方を考慮したバランスの取れた評価指標となる
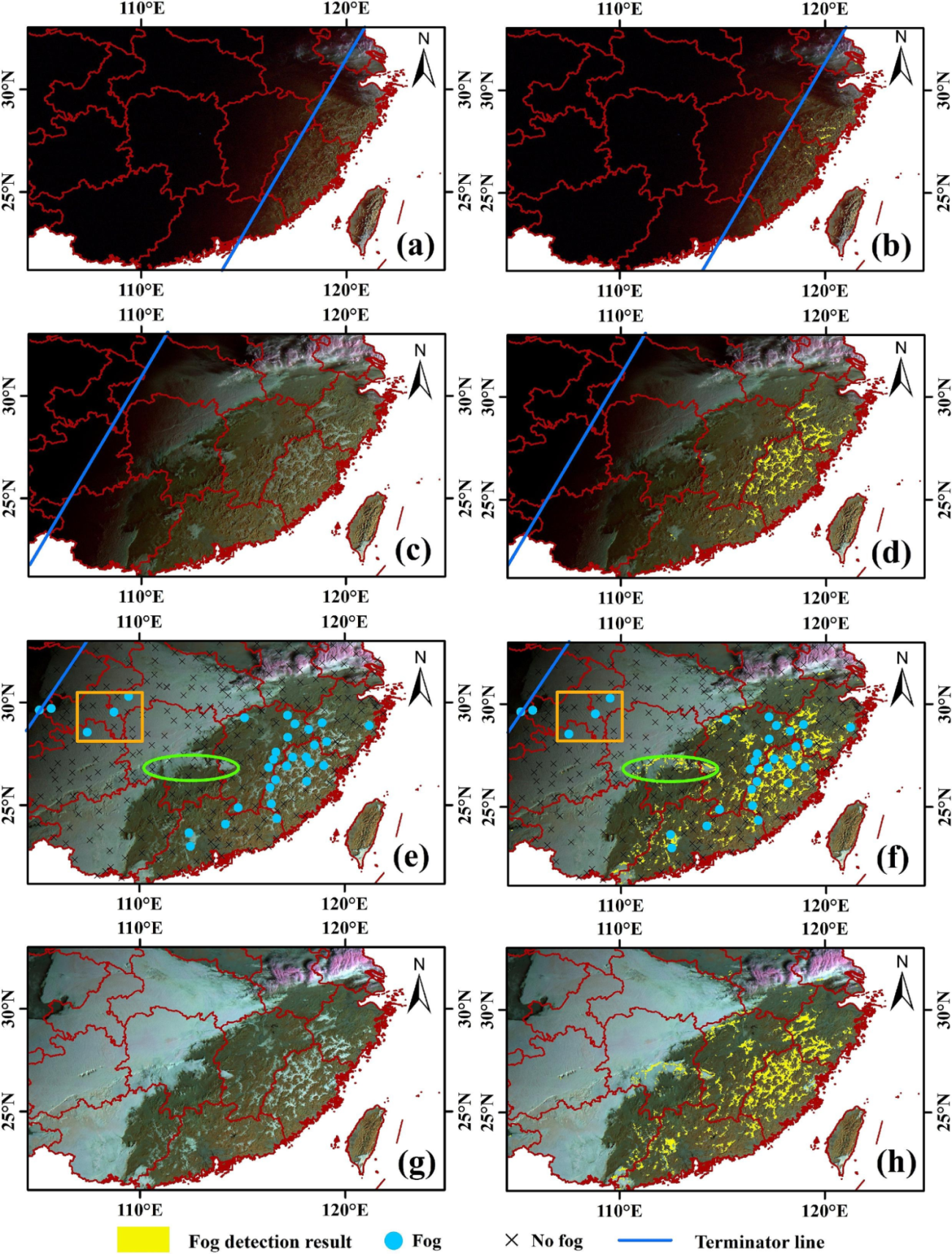
④図による検証結果の確認
・以下の図は、2017年1月27日の4つの時間帯(7:00, 7:30, 8:00, 8:30)における霧検出結果を示している
(左側パネル (a,c,e,g)が偽色画像(元画像)であり、右側パネル (b,d,f,h)が対応する霧検出結果の図)
・緑色の楕円領域では、霧と低層雲が非常に似ているにもかかわらず、アルゴリズムがどの程度区別できているかが顕著に示されている
#地形霧検出 #ひまわり8号 #低層雲除去 #亜熱帯 #交通
来月以降も「#MonthlySatDataNews」「#衛星論文」を続けていきますので、お楽しみに!
