文章作成から火星探査まで。生成AI「Claude」のルート計画でNASA火星探査車計456m走行成功【宇宙ビジネスニュース】
あなたが使っているかもしれない汎用生成AI「Claude」、実は火星探査にも使えます。NASA実証実験の詳細と背景を解説します。
2026年1月30日、NASAのジェット推進研究所(JPL)は、火星探査車「パーサヴィアランス」が生成AIによって計画されたルートを走行する実証実験に成功したと発表しました。この実験は2025年12月8日と10日に実施され、探査車は合計約456メートルの走行を完了しています。汎用生成AIによる惑星探査車のルート計画は先駆的な取り組みです。
宙畑メモ:「パーサヴィアランス (Perseverance)」とは
NASAの火星探査車で、2021年2月に火星のジェゼロ・クレーターに着陸しました。古代微生物の痕跡探索やサンプル採取を行っています。前世代の探査車 (キュリオシティ) より自律走行機能が向上しており、走行しながら周囲の障害物を認識・回避できるようになっています。
今回のミッションで使用されたのは、米国のAIスタートアップであるAnthropicが開発した「Claude」というAIモデルです。同社は2021年設立で、安全性重視のAI開発で知られています。Amazonから累計約80億ドル、Googleからも大型投資を受け、急成長を続けています。
Claudeは現在、ソフトウェア開発や文章作成を中心に幅広い業務で使われています。Anthropicの調査では、約36%の職業でタスクの25%以上にAI利用が見られます。そんな「日常の業務ツール」が、今回は火星探査という極限の専門領域にも投入されました。
宇宙分野でのClaude活用も進んでおり、2025年3月には地球観測衛星を運用するPlanet LabsがAnthropicと提携し、衛星画像分析への活用を始めています。
そして今回、Claudeの活用は地球観測から火星探査へと広がりました。リリースによると、今回の実証実験ではClaudeが衛星画像と地形データを分析し、パーサヴィアランスの走行ルートを自律的に計画しました。
具体的には、Claudeが火星周回機搭載のHiRISEカメラによる高解像度軌道画像と、デジタル標高モデルから得られた地形傾斜データを分析しています。
宙畑メモ:「HiRISE」とは
High Resolution Imaging Science Experimentの略。火星周回機「マーズ・リコネサンス・オービター」に搭載された高解像度カメラです。火星表面を約30cm/ピクセルの精度で撮影できます。
Claudeは約10メートル間隔でウェイポイントを設定してルートを生成し、自ら内容を検証・修正する作業も行いました。
宙畑メモ:ウェイポイントとは
探査車が安全に移動するために設定される中継地点のこと。探査車はウェイポイントごとに次の指示を受け取りながら目的地へ向かいます。
生成されたコマンドはJPLのシミュレーションで確認後、火星へ送信され、12月8日に約210メートル、10日に約246メートルの走行に成功しました。
12月10日の走行の様子を3Dで再現した映像は下記の通りです。
宙畑メモ:AutoNavとは
Autonomous Navigation(自律航行)の略。パーサヴィアランスに搭載された自律走行システムです。探査車自身のカメラで周囲の地形を認識し、障害物をリアルタイムで回避します。ただし探査車視点では遠方の把握が難しいため、広域のウェイポイント設定は従来から地球側で行われてきました。
今回の実験ではこの作業をClaudeが担いました。その後、AutoNavがその間の細かい経路判断を担っている点は既存フローと同様です。
下図は、12月10日の軌道画像です。マゼンタ色の線がClaudeの計画ルート、オレンジ色が実際の走行経路です。JPLエンジニアのレビューは軽微な修正のみで済み、Claudeが安全なルートの大枠を構築できたことがわかります。
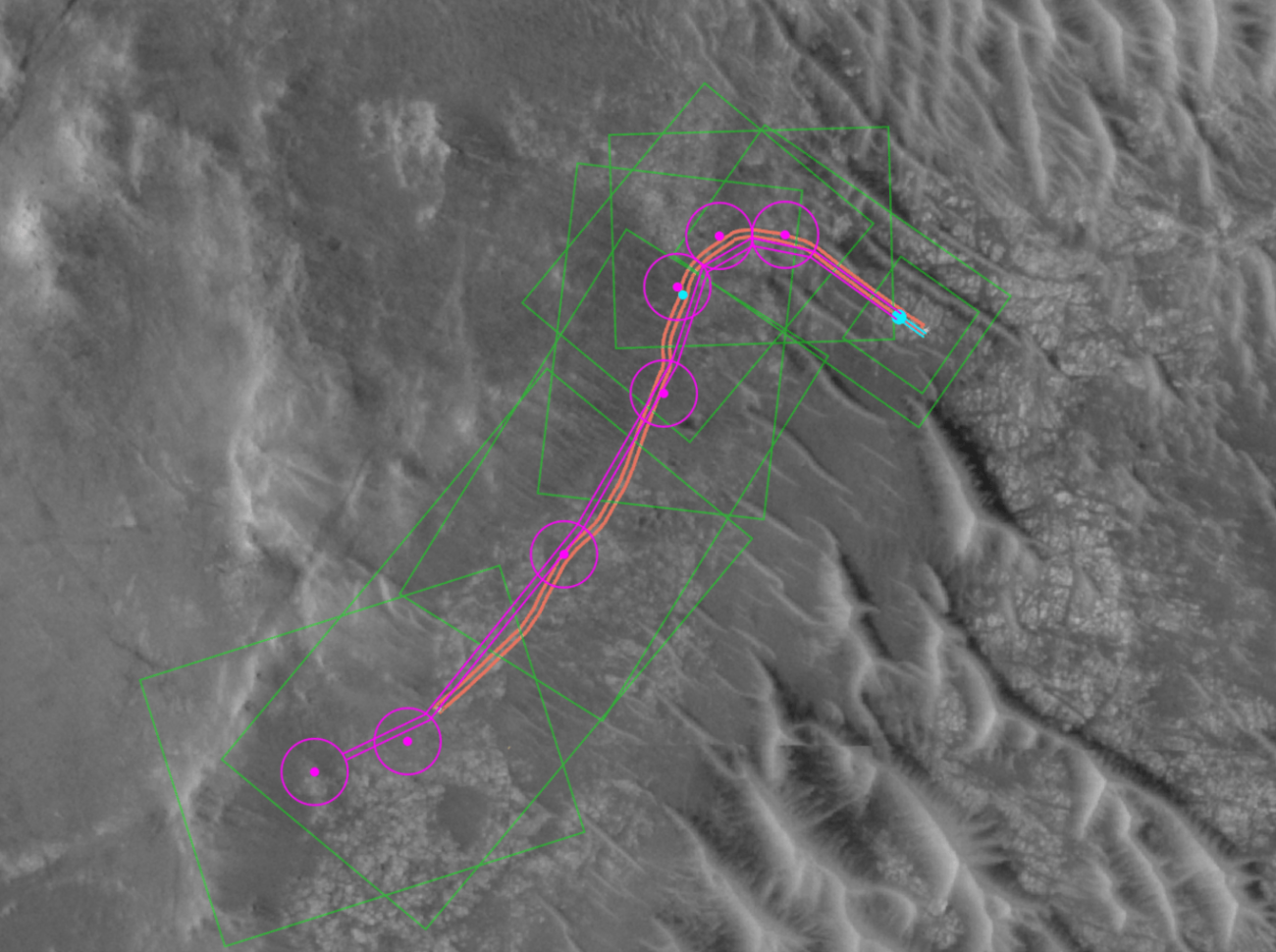
火星との通信は片道約5〜20分の遅延があり、探査車のリアルタイム操作は不可能です。従来はJPLのオペレーターが数十〜100メートル間隔でウェイポイントを手作業で設定していました。今回Claudeは約10メートル間隔でルートを生成し、精度向上が図られています。
JPLによると、生成AIは自律航行の三本柱である知覚(地形の認識)、位置特定(現在地の把握)、計画・制御(安全な経路の決定)を効率化する可能性があるとのことです。
Anthropicの試算では、この手法によりルート計画に要する時間を従来の半分程度に短縮できる見込みです。オペレーターの負担が軽減されることで、より多くの走行機会を確保し、科学データの収集量を増やすことが期待されています。
また、NASAのジャレッド・アイザックマン長官は今回の成果を次のように評価しました。
「この実証実験は、私たちの技術的能力がどれほど進歩したかを示し、他の世界を探査するやり方の幅を広げるものです。こうした自律技術は、地球からの距離が増すにつれて、ミッションの運用をより効率化し、困難な地形への対応力を高め、科学的成果を蓄積するのに役立ちます。」
さらに、JPL探査システムオフィスのマット・ウォレス氏は次のように将来の展望を述べました。
「地球側の地上だけでなく、探査車やヘリコプター、ドローン、その他の地表で活動する要素といったエッジ側の用途でも、NASAのエンジニア、科学者、宇宙飛行士の集合知で訓練された知能システムが搭載される未来を想像してほしいです。これは、月面での恒久的な有人活動に必要なインフラとシステムを確立し、米国を火星へ、さらにその先へ進めるために必要なゲームチェンジャーとなる技術なのです。」
今回の実証実験は、汎用生成AIが単なるチャットツールや業務支援ツールにとどまらず、宇宙探査という極限環境でも信頼性をもって活用できることを示した歴史的な一歩といえます。日常の業務ツールが火星で走行ルートを描く。汎用生成AIの可能性は、もはや地球にとどまりません。
今回Claudeは地球上で計算を行いましたが、より遠方の探査では通信遅延が増すため、将来的には探査機自身へのAI搭載も重要な研究課題となるでしょう。
参考記事
NASA’s Perseverance Rover Completes First AI-Planned Drive on Mars