宇宙ロボット開発にも標準OSを利用する時代に? 宇宙ロボットの最前線とSpace ROSの展望
スペースデブリ除去、月面基地建設、火星探査……宇宙開発はもはやロボットなしには語れません。地上ロボット開発の標準「ROS」を宇宙向けに進化させたオープンソース基盤「Space ROS」の概要と展望を紹介します。
スペースデブリの捕獲・除去、衛星への燃料補給、衛星の保守・修理、月面基地の建設、そして火星への有人探査——近年の宇宙開発のロードマップを眺めると、そのほぼすべてのシナリオに「ロボット」が欠かせないことがわかります。もはや宇宙開発はロボットなしでは語れない時代に突入しているといっても過言ではありません。
また、近年は民間宇宙企業の増加や技術の進展、アルテミス計画をはじめとする国際的な動きも追い風となり、地上技術の宇宙転用に対する期待はこれまでになく高まっています。
しかし、宇宙開発におけるロボットの重要性が急速に高まる一方で、その実現には依然として多くの課題が残されています。宇宙空間という特殊な環境に対応するためには、地上ロボット開発とは異なる技術や知見に加え、長年にわたり蓄積された閉じたノウハウが求められる場面も少なくありません。さらに、依然として宇宙分野は、地上で実績を有する大学や企業にとっても参入障壁が高く、宇宙開発は長らく限られたプレイヤーによって担われてきました。
そうした背景の中、このような状況を変えようとしているのが、今回ご紹介する「Space ROS」です。Space ROSとは、地上のロボット開発のデファクトスタンダード(事実上の標準規格)となっているROS(Robot Operating System)をベースに、宇宙の技術をオープンで、誰もが扱えるようにするために生まれた、オープンソースプロジェクトです。
本記事では、宇宙ロボット開発の背景と課題を整理したうえで、Space ROSの概要を解説します。あわせて、地上向けロボット開発に携わる方に向けて、実際にSpace ROSを試すための簡単な手引きも紹介します。
(1)ローバー、ロボットアームも?これまでの宇宙ロボット
「宇宙ロボット」と聞いて、皆さんは何を思い浮かべますか?
月や火星を走り回る探査ローバー、あるいはISSに取り付けられたロボットアーム——そのあたりが代表的なイメージかもしれません。ここでは、これまでの宇宙ロボットの歩みを、世界の主要事例から日本の取り組みまで振り返ってみます。
1. 月ローバー
月ローバーには、探査目的のものと有人ミッションでの移動手段となるものの大きく2種類があります。
探査目的のローバーとして最初に月面を走ったのは、冷戦期の旧ソ連が送り込んだLunokhod 1(1970年)です。月面到達後、昼間の期間に1ヶ月あたり1km程度のペースで移動しながら、10ヶ月間にわたる探査活動を続けました。
その後、中国は2019年から玉兔二号を月の裏側で運用しており、現在も探査を継続しています。
日本からは、わずか228gの小型ローバーSORA-Qが、月着陸探査機SLIMとともに2024年に月面に降り立ち、自律的な撮影に成功しました。

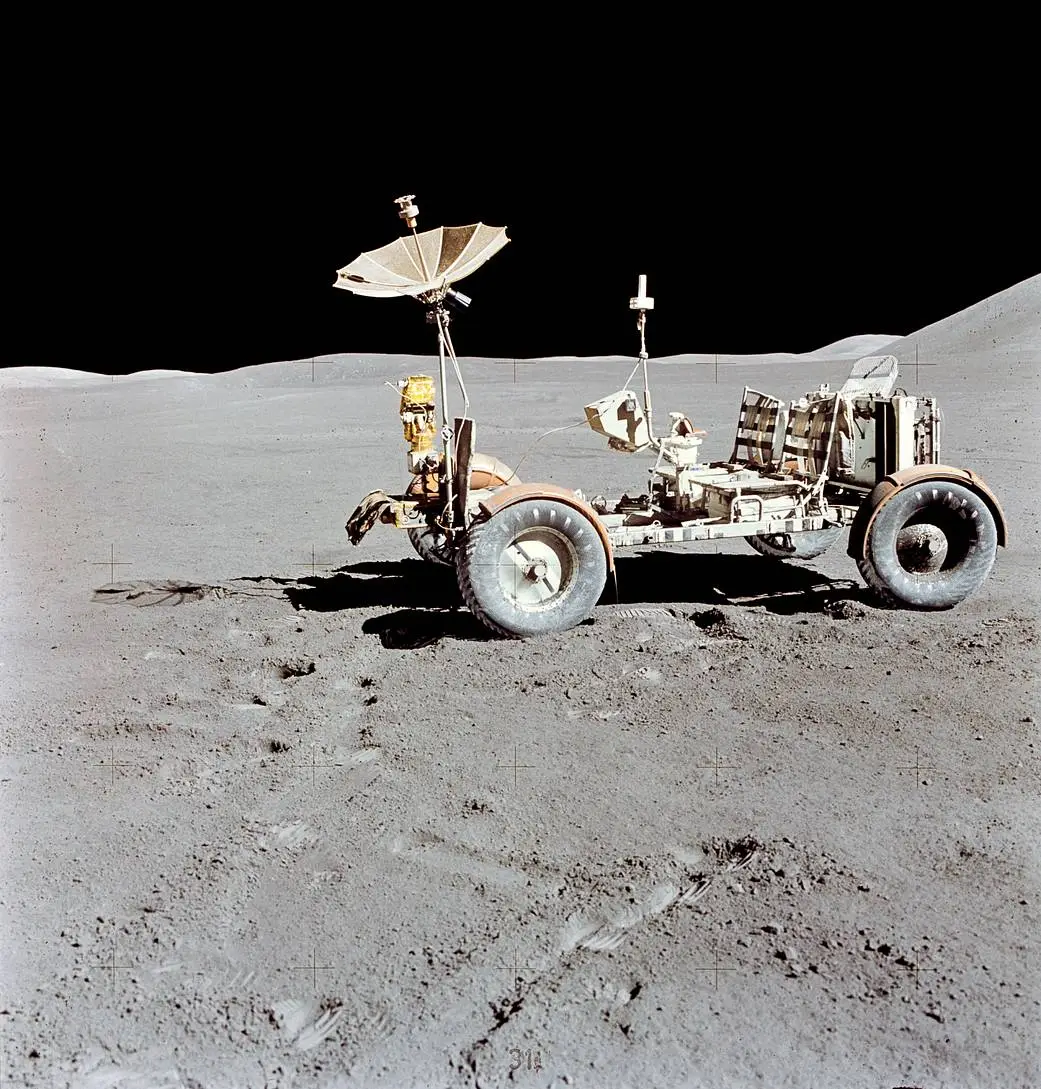
有人ミッションの文脈では、アポロ計画(15〜17号)でLunar Roving Vehicleが使われ、宇宙飛行士が現地で操縦しました。現在は、アルテミス計画の一環として日本が主担当を担う有人与圧ローバーの開発が進んでいます。
2. 火星ローバー
火星への到達は月よりもさらに難しく、最短でも1年程度の航行が必要で、打ち上げ好機は2年に一度しか訪れません。
関連記事
火星移住を考えるにあたっての火星のキホン~計画、環境、課題、Q&A~
これまで探査ローバーを火星に送り込んだことがあるのはアメリカと中国のみです。
NASAが送り込んだOpportunityは特に有名で、2004年の着陸後に14年間・42kmという驚異的な走破を達成しました。続くCuriosity(着陸2012年)は現在も稼働中であり、Perseverance(着陸2021年)は岩石サンプルの採取や、小型ヘリコプターIngenuityの飛行実証など、新たなマイルストーンを刻んでいます。
火星ミッションにおける代表的な課題は通信遅延です。最も条件の良い時でも片道10分程度かかるため、地上からのリアルタイム操作は不可能で、細かい動作判断はすべてローバー側の自律制御で対処します。危険な地形への進入を地上からの緊急停止信号で防ぐことすらできないため、ソフトウェアの設計に多くの知恵が注ぎ込まれています。
3. ロボットアームの系譜
ローバーと並んで宇宙ロボットの代名詞といえるのがロボットアームです。ISSには、カナダが開発した全長約17mの巨大アームカナダアーム2(Canadarm2)が取り付けられており、モジュールの移動や補給船のキャッチ、宇宙飛行士の船外移動の足場として活躍しています。

4. 日本の宇宙ロボット
日本も、独自の宇宙ロボット技術を長年にわたって積み上げてきました。その礎となったのが、1997年に打ち上げられた技術試験衛星VII型「おりひめ・ひこぼし」(ETS-VII)です。チェイサー衛星「ひこぼし」とターゲット衛星「おりひめ」の2機からなるこのミッションでは、世界初となる無人衛星同士の自動ランデブー・ドッキングと、地上からの遠隔操作による軌道上ロボットアーム実験を成功させました。この成果はのちのISS補給機「こうのとり」の開発にも受け継がれています。

ISSの日本実験棟「きぼう」には、ETS-VIIの実績を基に開発されたJEMRMS(JEM Remote Manipulator System)が搭載されています。全長約10mの親アームと、その先端に取り付けられる全長約2mの子アームで構成されており、いずれも6つの関節を持ち人間の腕に近い動きが可能です。親アームは船外実験装置などの大型機器の交換を、子アームはより精密な作業を担います。宇宙飛行士が常に船外活動(EVA)を行わなくても軌道上の保守・整備作業を実施できる、実用的なロボットシステムとして機能しています。

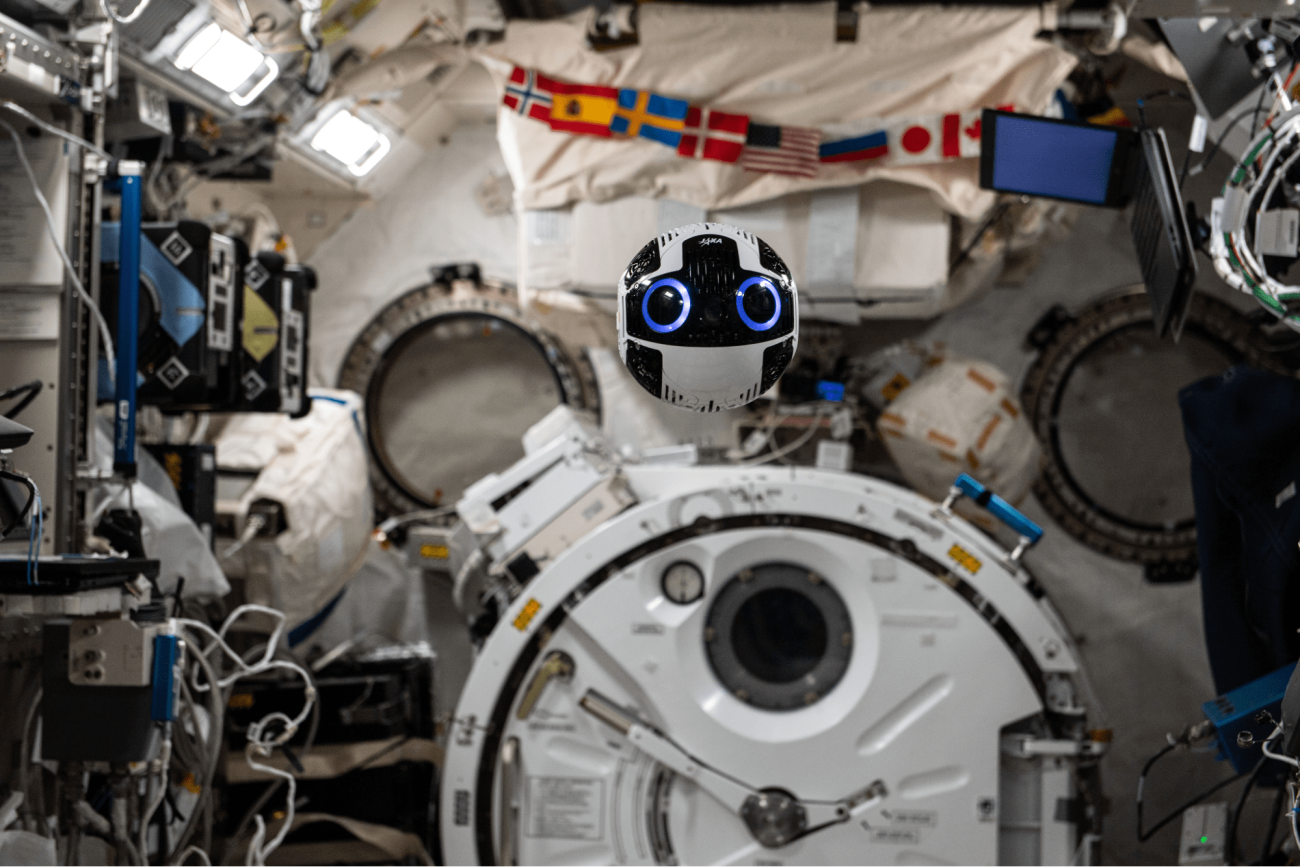
近年の取り組みとして注目されているのが、Int-Ball2です。JAXAが開発したこの球形の船内ドローンロボットは、2023年6月にISSへ打ち上げられ、「きぼう」船内を自律的に飛行しながら写真や動画の撮影を宇宙飛行士に代わって行います。8基のプロペラで6自由度の姿勢・位置制御を行い、充電ステーションへの自動ドッキングも可能です。「宇宙飛行士の撮影作業の負担をゼロにする」というコンセプトのもと、将来の有人探査ミッションへの応用も見据えた技術実証の場となっています。
そして、次世代を見据えた取り組みとして進行中なのがCRD2(商業デブリ除去実証)です。地球軌道上に増え続けるスペースデブリの除去技術を確立するため、JAXAと民間企業アストロスケールが連携して進めるプロジェクトです。フェーズIでは、役目を終えたロケット上段(大型バスほどの大きさ)への接近・近傍運用に成功し、デブリの状態を撮影する世界初のミッションを完遂しました。
フェーズIIでは、ロボットアームによるデブリの捕獲・軌道離脱の実証を目指しており、こうした「非協力的ターゲット」を軌道上でつかむ技術は、宇宙ロボット工学の最前線に位置するものです。
これらはそれぞれ独自の設計思想のもとで開発されてきましたが、こうした個別開発の積み重ねの先に、共通基盤の必要性が浮かび上がってきています。
(2)オーダーメイドから大量生産の時代へ?これからの宇宙ロボット
では、これからの宇宙開発はどのような姿になっていくのでしょうか。宇宙空間の中でも低軌道の商用宇宙ステーション、軌道上サービス、月面という3つの場所に分けて本記事では考えてみます。
■低軌道の商用宇宙ステーション
まず目の前に迫っているのが、ISSの退役という大きな転換点です。ISSは2030年末に運用を終了する予定であり、その後継として複数の商業宇宙ステーションが開発競争を繰り広げています。
Axiom Spaceは2028年を目処に独立した商業ステーションの運用開始を目指しており、Vast社のHaven-1も2027年打ち上げに向けた準備を進めています。
さらにVoyager SpaceとAirbusらが進めるStarlab、Blue OriginとSierra Spaceが手掛けるOrbital Reefなども控えており、地球低軌道の活動拠点はこれから複数の民間施設が並立する時代へと移行します。
こうした商業宇宙ステーションの維持・運用には、これまで宇宙飛行士が担ってきた作業の多くをロボットが代替していくことが求められます。船内の点検、機器の交換、実験の撮影支援——ISSではすでにInt-Ball2がその第一歩を踏み出していますが、商業ステーション時代には、こうしたロボットの役割がさらに広がっていくでしょう。
■軌道上サービス
また、軌道上では老朽化した衛星への燃料補給や部品交換といった「軌道上サービス」の需要も高まっています。CRD2でJAXAとアストロスケールが挑んでいるデブリ除去もその一環であり、非協力的な物体に接近・捕獲するロボット技術は、次世代の軌道上サービスの根幹をなすものです。
■月面
月面に目を向けると、アルテミス計画のもとで人類の持続的な月面活動という大きな目標が動き出しています。月面基地の建設、月周回有人拠点Gatewayの構築、そして日本が主導する有人与圧ローバーによる広域探査——これらは単発のミッションではなく、複数のロボットや機材が連携して長期間にわたって進める活動です。月面での建設作業ひとつをとっても、資材を運搬するローバー、施工を担う無人重機、状況を監視するロボットといった具合に多種多様なロボットが協調して動く世界が想定されています。

ここで特に重要になるのが、ISRU(In-Situ Resource Utilization:現地資源利用)という考え方です。
地球からすべての物資をロケットで運び続けることには、コストとスケールの両面で限界があります。月の南極付近には水(氷)の存在が確認されており、これを分解することで水素燃料や酸素を現地生産することが期待されています。
また、月面の砂(レゴリス)を原料に3Dプリンターで建設材料を製造する研究も進んでいます。
関連記事
月面の砂から太陽光電池パネル製造へ。地上での技術応用も。ルクセンブルク企業Maana Electricの現在地
持続可能な宇宙開発には「現地の資源を使って、現地でインフラを整える」という発想が不可欠であり、その担い手はロボットです。人間が直接作業するには過酷すぎる環境のなかで、複数のロボットが自律的に連携してインフラを構築していく——そのような未来が、もはや絵空事でなくなってきています。
こうした流れの中で、宇宙ロボットの種類と数は急速に増えていくことが見込まれます。軌道上サービシング、月面建設、ローバー群による探査、ステーション内の自律支援——それぞれのシーンで異なる設計のロボットが必要となります。
しかし、宇宙機全体が自律化・ロボット化していくこの流れの中で、これまで行ってきたミッションごとにイチから設計・開発するオーダーメイドのスタイルは、コスト効率、開発スピード、そして民間企業の参入しやすさの観点から、改善が求められています。
「いかに効率よく、再利用可能な形でロボットを開発するか」——この問いこそが、これからの宇宙ロボット開発に必要となる技術であり、共通ソフトウェア基盤の必要性が強く意識されるようになってきた背景です。
(3)地上ロボットと宇宙ロボットの大きな違いは
地上のロボット開発に慣れたエンジニアが宇宙ロボット開発に向き合うと、まず気づくのは「考慮すべき環境がまるで違う」という事実です。地上では当たり前のように使えるリソースや試験手法が、宇宙では根本から制約されます。その違いは大きく、環境・リソース・検証の三つの観点と、その結果から生じる高コスト化に整理できます。
1. 環境の違い:放射線、真空、重力
地上のロボットは基本的に、大気・常温・重力(9.8m/s²)という安定した環境の中で動きます。宇宙はその前提がすべて崩れます。
まず大きな課題となるのは放射線です。地球の大気は宇宙放射線のほとんどを遮蔽してくれますが、宇宙空間にはその守りがありません。高エネルギーの粒子が電子部品を直撃し、メモリの値を書き換えたり(シングルイベントアップセット)、最悪の場合は部品を破壊します(シングルイベントラッチアップ)。
対策として放射線耐性を持つ宇宙グレード部品を使うことになりますが、これらは地上の最新部品に比べて計算性能が低いうえに、入手性も悪く、高価です。
また、温度環境も過酷です。大気がないため空気への放熱ができず、日照下では120度、日陰ではマイナス150度にも達します。地上であれば冷却ファンや自然対流で済む場面でも、宇宙では熱設計を根本から作り直す必要があります。
そして、重力です。月面では地球の1/6、火星では1/3、小惑星リュウグウに至っては1/80000という具合に、目的地によって物理環境がまったく異なります。宇宙ステーション内や軌道上では微小重力(無重力)状態となり、ロボットアームをわずかに動かしただけで機体全体が反作用で回転してしまうような、地上では体験できないダイナミクス(力学)が生じます。
さらに、月面においては、月ローバーのタイヤは地球と同じ設計のままでは砂(レゴリス)にはまり込んでしまいます。レゴリスは、地上の砂と比べると、平均粒径は70μm程度で、非常に細かく、ガラスのようにギザギザした形状をしています。有人環境では、肺にレゴリスが入らないよう、十分気を付ける必要もあります。
このように、目的地ごとに物理モデルが変わる、というのは地上ロボット開発ではほとんど意識しない感覚でしょう。
2. リソースの違い:計算・電力・通信
宇宙グレード部品を使う結果として、使える計算資源は地上と比べて大幅に限られます。
ROS開発者であれば実感があると思いますが、ロボットの機能を充実させるほど計算負荷はすぐに増大します。しかし、宇宙では、上記の放射線などの過酷な環境に耐えられるハードウェアが求められる都合上、その計算力に強い上限があります。
電力も同様で、太陽電池パネルのサイズや搭載バッテリー容量に上限がある中で、センサー・アクチュエータ・計算機のすべてを賄う必要があります。
通信もまた大きな制約です。ISSのような近傍でも数秒オーダーの遅延が生じ (最近は速くなってきていますが)、火星では最低でも片道10分以上かかります。
人間がリアルタイムで操作してトラブルに対処する、という地上では当たり前の方法が、宇宙ではほぼ使えません。そのため、細かい動作判断はロボット自身が自律的に行うことが求められ、自律制御の設計に大きな比重が置かれます。
3. 検証の難しさ:リハーサルができない
地上のロボット開発では、実機を繰り返し動かして問題を洗い出すことができますが、宇宙ロボットはそれが極めて困難です。
前述のような重力・真空・放射線環境を地上で長時間、高い忠実度で再現する手段は限られており、パラボリックフライト、落下塔、空気浮上装置といった特殊な試験設備を組み合わせるしかありません。しかし、いずれも時間・コスト・再現精度に限界があります。
ここまでの話を知っていただくと、はやぶさ2がリュウグウへのタッチダウンを1発で成功させたことが世界を驚かせたことの凄さがより鮮明に伝わるのではないでしょうか。
何機も打ち上げて試行錯誤することは予算的にも現実的ではなく、1回のミッションで確実に成功させることが宇宙ロボット開発の大前提です。
4. 高コストなオーダーメイド開発
こうした制約が重なった結果、宇宙ロボットはこれまで「一点もの」として開発されてきました。月ローバーなら月の環境に、火星ローバーなら火星の環境に、それぞれ最適化されたハードウェアと、ゼロから組み上げたソフトウェアが用いられてきたのです。
限られたリソースをまず環境対応に振り向けなければならず、共通化や汎用化に余裕を割くことが難しかったと言えます。オーダーメイド中心であったのは、単に閉鎖的だったからではなく、そうせざるを得ない技術的・事業的背景があったためです。
打ち上げ費用はSpaceXのFalcon 9登場(2010年)以降、低軌道への輸送コストが1kgあたり65,000ドル(スペースシャトル)から約2,900ドルへと大幅に下がりました。
しかし、ハードウェア・ソフトウェアの開発・検証・運用にかかる負担は依然として重く、ミッションのたびに車輪の再発明を繰り返す構造は変わっていません。この課題を解消するためのソフトウェア基盤こそが、次章で紹介するSpace ROSが目指すものです。
(4)「Space ROS」で実現する宇宙ロボット開発の参入障壁の解消
Space ROSについて紹介する前に、ROS(Robot Operating System)について紹介します。
すでに地上のロボット開発の世界では、ROSはデファクトスタンダードとなっています。ROSとは2007年にスタンフォード大学のロボット向けAI開発プロジェクトを発端として生まれ、現在はOpen Source Robotics Foundation(OSRF)を中心に世界中の開発者によって支えられています。2024年時点でROS2のパッケージダウンロードは全体の約8割を占めており、自動運転、産業用ロボット、サービスロボット、ドローン、医療ロボットまで、幅広い分野で実用化が進んでいます。
ROSの強みは、共通の通信インターフェースによって機能を独立したNodeとして組み合わせられる、疎結合な設計にあります。
この仕組みにより、ソフトウェアの再利用や機能追加がしやすく、実機と物理シミュレータを同じソフトウェアでつなぐことも容易です。さらに、3D可視化(rviz)、ログの記録・再生、デバッグ支援といったロボット開発向けのツール群が充実しており、数千を超えるオープンソースパッケージを活用することで、開発者は毎回ゼロから作り直す必要がなくなりました。
もっとも、地上ロボットの世界も最初からこうだったわけではありません。かつては各チームや各メーカーが独自のミドルウェアや開発基盤を作り込み、似たような機能を何度も作り直すのが当たり前でした。
ROSが広がったことで、ソフトウェアの再利用性と拡張性が高まり、シミュレーションから実機までを通じた開発スタイルが根付き、地上ロボット技術は大きく前進しました。

宇宙ロボットの分野は、いままさにこの歴史を追いかけようとしている段階だといえます。高い信頼性と安全性の要求から、依然としてオーダーメイドの組み込み開発が主流ですが、だからこそ再利用しやすく、しかも厳しい要求にも向き合える共通基盤への期待が大きいのです。
その期待に応えるように生まれたのがSpace ROSです。Space ROSは、ROSを土台に、宇宙ロボティクスや自律型宇宙システムで求められる安全性・信頼性・検証性に応えられるよう強化していく、オープンソースのフレームワークです。

NASAとOpen Roboticsを中心に開発が進められており、目指しているのは、地上で育ってきたROSの資産や開発文化をできるだけ活かしながら、宇宙ミッションでも再利用可能なフライト品質のソフトウェア基盤を整えていくことです。
研究用とフライト用で分断されがちだった開発の流れをつなぎ、開発期間の短縮、ミッション間での再利用、ライフサイクルコストの低減につなげようとしている点に、Space ROSの大きな意義があります。
具体的なROSとの違いを見ると、Space ROSはROS 2をベースにしつつ、宇宙ミッションに求められるリアルタイム性と信頼性をさらに強化しています。
ビルドとインフラ、コード解析ツール、要件管理プロセス、宇宙特有の機能——この4点が主な差分であり、とりわけ航空宇宙分野の品質基準への準拠が大きな特徴です。
RTOS(Real-Time Operating System)上での動作、フライト実績のあるソフトウェアとの連携、そしてIKOSといった静的解析ツールを用いた安全性・信頼性の確保が重視されています。
現時点では「宇宙特有のロボット技術」というよりも、まずは信頼性・安全性に関する機能の強化に重点が置かれています。これをベースに将来的には、無重力下でのマニピュレーションや姿勢制御、スラスタ制御、さらに月面や火星といった特徴点の少ない環境でのナビゲーションなど、宇宙特有のロボット技術パッケージの拡充が期待されます。
地上のROSエコシステムがそうであったように、Space ROSが普及すれば「自分でも宇宙ロボットが作れるかもしれない」と感じる開発者が増え、宇宙ロボット開発のコミュニティが自律的に拡大していく——そのような好循環が生まれることが期待されています。
(5)すでにSpace ROSは誰もが利用できる状態に
実は、Space ROSはすでに公式Webサイト(https://space.ros.org/)およびGitHub(https://github.com/space-ros)で公開されており、誰でもアクセスして試すことができます。
現時点では実際の宇宙機・宇宙ロボット上での動作実績はまだありませんが、少しずつデモが整備されており、手元の環境で機能を試すことは可能な状態になっています。
ここで重要なのが、Space ROSの目標と、その実現までのステップを分けて考えることです。究極的には宇宙ミッションで求められる品質要求に応えられるROSベースのソフトウェア基盤を育てていくことが目標ですが、そこへ一足飛びに到達するのは簡単ではありません。
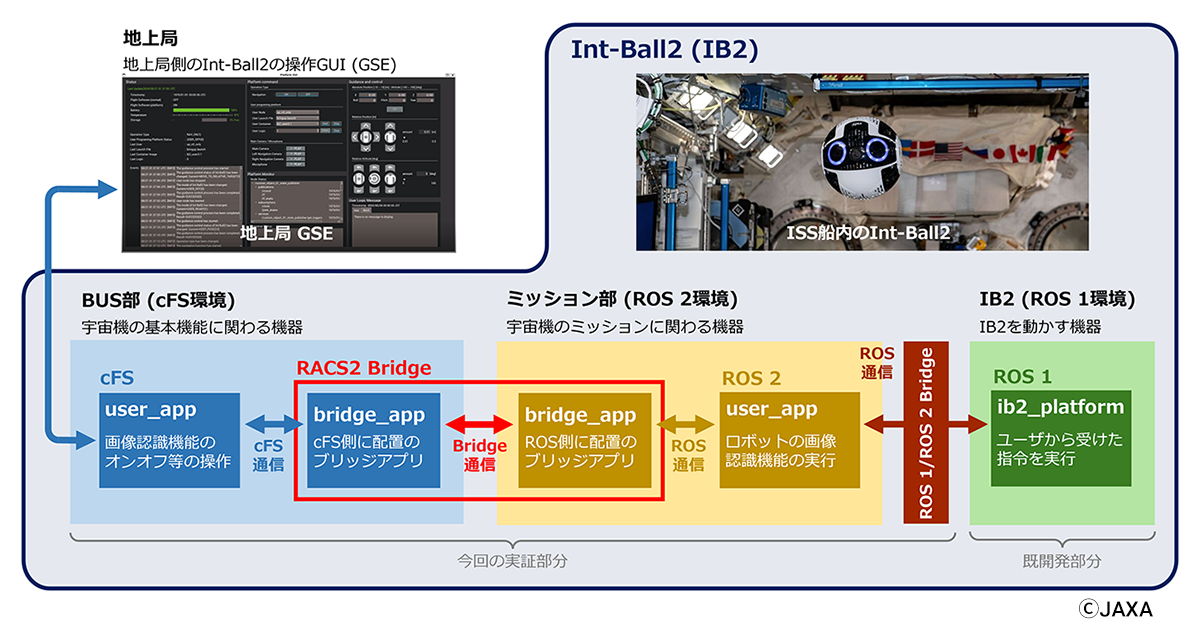
そこで、現実的な第一歩として、JAXAが開発したのがRACS2(ROS 2 and cFS System)です。RACS2は、高い信頼性が求められる部分にはNASAのフライト実績あるOSSフレームワーク「cFS(core Flight System)」を使い、ロボティクス技術の部分にはROSを組み合わせるというアーキテクチャです。
「いきなり全面的にROSだけで宇宙機を構成する」のではなく、信頼性が重視されるフライトソフトウェアと、再利用性の高いロボティクスソフトウェアを段階的につないでいくための、実践的なアプローチです。実際にRACS2はInt-Ball2(ISSの「きぼう」で運用中の船内ドローン)への搭載を通じて軌道上での実証に成功しており、Space ROSのコアパッケージの一つとして開発が進んでいます。

関連記事
「ROS2 and cFS System (RACS2) Bridge」ソフトウェア、ISS船内の自律カメラロボット「Int-Ball2」で軌道上実証に成功
コードに触れてみたい方へ
Space ROSおよびRACS2のコードはすべて公開されており、以下のリポジトリが出発点になります。まずはREADMEを読み、Dockerイメージを動かしてデモを試してみるところから始められます。ROS 2の使い方に親しんでいる方であれば、パッケージ構成も比較的なじみやすいはずです。
・Space ROS 公式GitHub:https://github.com/space-ros
・RACS2(ROS 2 and cFS Bridge):https://github.com/jaxa/racs2_bridge
・RACS2 Extended DDS:https://github.com/jaxa/racs2_extended-dds
・RACS2デモ(Space ROS上):https://github.com/space-ros/demos/tree/main/racs2_demos_on_spaceros
日本語で読める記事・資料
日本語でSpace ROSを学ぶには、Qiitaのアドベントカレンダーが最も充実したリソースです。JAXAをはじめとする宇宙開発に携わるメンバーが、概要からチュートリアル、開発状況、応用まで幅広く記事を投稿しており、体系的な理解を得るのに最適です。25本以上の記事が日本語でまとめられています。
・Space ROS Advent Calendar 2024:https://qiita.com/advent-calendar/2024/space-ros
・Space ROS Advent Calendar 2025:https://qiita.com/advent-calendar/2025/space-ros
また、ROSConJPでもSpace ROSに関する発表が行われており、JAXAにおける取り組みの全体像や技術的な詳細を把握するのに役立ちます。
・ROSCon JP 2024「JAXAにおける宇宙機開発へのROS活用とSpace ROS開発」:https://roscon.jp/2024/presentations/05.pdf
・ROSCon JP 2025「宇宙アプリケーションへのROS適用に向けた取り組み RACS2によるcFS-ROS2連携のISS軌道上実証」:https://roscon.ros.org/jp/2025/presentations/09.pdf
さらにJAXA公式のWeb記事でも、Space ROSおよびRACS2の開発背景や技術的な位置づけが解説されています。
・JAXAにおける宇宙機向けソフトウェア開発:https://www.kenkai.jaxa.jp/research/innovation/spacecraft_software.html
・RACS2の開発について:https://www.kenkai.jaxa.jp/research/innovation/racs2.html
コミュニティへの参加
Space ROSや宇宙ロボットに関心を持った方にぜひ知ってほしいのが、Space ROS Clubです。Space ROSや宇宙ロボットの開発を日本から盛り上げることを目的としたコミュニティで、概要紹介からチュートリアル、研究・開発に関する議論まで幅広く行われています。名前に「Space ROS」とありますが、宇宙ロボット好きな方なら誰でも歓迎のコミュニティです。主にDiscordサーバーを通じて活動しており、気軽に参加できます。
・Space ROS Club Discord:https://discord.gg/cGXxdcxMWN
(6)Space ROSを触る際の注意点
Space ROSに触れる前に、一点大切なことを理解しておく必要があります。それは「Space ROSを使えば自動的に宇宙品質が担保されるわけではない」という点です。
Space ROSは、宇宙品質を目指すための土台やツールを提供してくれますが、それだけで自動的に安全で信頼性の高いソフトウェアになるわけではありません。
例えば、ゼロ除算のような単純なケースでも、マルチスレッドや処理タイミングの揺らぎが加わるだけで問題は途端に複雑化します。地上の開発環境では見えにくかった不具合が、並列処理やリアルタイム制約の厳しい宇宙用途で初めて表面化することも少なくありません。Space ROSが提供するIKOSをはじめとする静的コード解析ツールや、品質担保のための各種仕組みを正しく理解したうえで使いこなすことが前提となります。
品質基準という面では、Space ROSはNASAの規格NPR7150.2のClass A、すなわち宇宙有人システム向けの最高クリティカリティクラスへの準拠を目指して設計されています。ただしこれはあくまで目標であり、実際にどのクラスを適用するかはミッションの要件次第です。
NPR7150.2では、ソフトウェアライフサイクルの計画・設計・実装・試験・運用という各フェーズを通じた管理と、要件から実装・検証までの一貫したトレーサビリティが求められます。V字モデルやコンフィギュレーション管理といった考え方は地上開発でも広く用いられていますが、宇宙分野ではそれらをより厳格に運用し、「どの要件に対してどの試験で検証したか」という妥当性の根拠まで問われます。
もう一つ意識しておきたいのは、Space ROSが現時点では「宇宙特有のロボット技術」よりも「信頼性・安全性に関する基盤の整備」に重点を置いているという点です。
実際の宇宙機での飛行実績がまだないという現状を踏まえると、Space ROSを触る際には「完成した宇宙用ミドルウェア」としてではなく、「これから宇宙での使用実績を積み上げていく途中のオープンソースプロジェクト」として捉えるのが適切です。その分、開発に関わるハードルは地上向けROSより高い部分もありますが、逆に言えば今まさに形が作られていく段階に参加できるという面白さでもあります。
一方で、地上ロボット向けのROS 2と宇宙ロボット向けのSpace ROSは、リアルタイム性や信頼性の確保という共通の課題を抱えており、互いの知見を活かせる領域も多くあります。「宇宙のことは宇宙の専門家だけが考えること」ではなく、地上ロボット開発者の視点からのコントリビュートが宇宙ロボット技術全体を底上げしていく——そのような開かれた姿勢でSpace ROSコミュニティは歩んでいます。
宇宙向けの開発で得られた信頼性・安全性に関する知見は、自動車や医療、産業ロボットなど地上の高信頼性システム開発にも応用できるものです。宇宙と地上、双方向で技術が育っていくエコシステムこそが、Space ROSが目指す大きな姿の一つでもあります。
(7)宇宙ロボット開発に興味がある方への手引き
Space ROSや宇宙ロボットの世界に興味を持ったなら、ぜひ次の一歩を踏み出してみてください。情報収集から実際のコミュニティ参加、競技会への挑戦まで、国内にも入口はいくつか用意されています。
コミュニティ・勉強会
まず気軽に参加できる場として、前述のSpace ROS Clubがおすすめです。宇宙ロボットやSpace ROSに関心のある方なら誰でも歓迎となっており、概要の紹介から技術的な議論まで幅広く行われています。Discordサーバーを通じていつでも参加できます。
・Space ROS Club 招待リンク:https://discord.gg/cGXxdcxMWN
ROSそのものの国内コミュニティとしては、ROS Japan Users Group(ROS Japan UG)があります。ROSに関する勉強会や講習会を定期的に開催しており、Space ROSに関する話題も徐々に増えています。またROSコミュニティの開発者会議である**ROSCon JPでは、毎年日本語でのROS関連発表が行われており、Space ROSの講演も実施されています
・ROSCon JP:https://roscon.jp
・ROS Japan Users Group:https://rosjp.connpass.com
競技会への参加
動かして学ぶという観点では、競技会への参加もよい一歩になります。
ROSを活用した自律型宇宙ロボットの競技会として、RoboCup@Spaceが立ち上がっています。「AI × 宇宙 × ロボット」というテーマのもと、ROSを活用した競技が行われており、Space ROSをベースにした競技の実施も今後検討されています。宇宙ロボットの開発を実践的に体験できる場として、ぜひ参加を検討してみてください。
・RoboCup@Space JP公式Webサイト:https://robocupatspacejp.github.io
この競技では、JAXAが開発したInt-Ball2のROSを用いたシミュレータを用いています。下記のようなチュートリアルを公開しておりますので、試しに触ってみて下さい。
・RoboCup@Space JP:Int-Ball2シミュレータチュートリアル:https://qiita.com/YukiIkeda_robot/items/aed18db60e41e4fa6a52
今がチャンス
宇宙ロボット分野はまだ成長途中であり、だからこそ今参入することに意義があります。
特に地上でROSに慣れ親しんだエンジニアにとって、Space ROSは自分たちの知見やソフトウェア資産を宇宙へ持ち込むための、有力な選択肢のひとつです。
宇宙向け開発の難しさはありますが、共通の基盤が育てば育つほど、一人ひとりが宇宙ロボット技術に貢献できる可能性が広がっていきます。
まずその存在を知り、議論し、試してみる人が増えることが、Space ROSコミュニティを、そして宇宙ロボット技術全体を前に進める力になっていくでしょう。
これから宇宙ではロボットがますます活躍する時代となります。その時代を担うひとりになるチャンス、今からSpace ROSを触ってみませんか?
