輸送費削減の秘策となる?カシオ計算機とJAXA、月面を模したフィールドで測位技術の実証実験を実施
カシオ計算機とJAXA宇宙探査イノベーションハブは、JAXA相模原キャンパスの「宇宙探査フィールド」で月面を模したフィールドでの測位技術の実証実験を実施。その概要と目的、今後の展望を紹介します。
2026年2月4日、カシオ計算機(以下、カシオ)と国立研究開発法人宇宙航空研究開発機構(JAXA)宇宙探査イノベーションハブ(以下、探査ハブ)は、JAXA相模原キャンパス「宇宙探査フィールド」において、月面を模したフィールドでの測位技術の実証実験を行いました。これは、カシオが提供する可視光通信技術を用いた高精度位置測位システム「picalico(ピカリコ)」を利用したものであり、月面基地建設や資源探査等での活用が期待されています。

(1)月面基地建設時、月面には測位システムがない?
現在、アルテミス計画に代表されるような月面開発が世界規模で進行していますが、月面に宇宙飛行士を送り込むには、非常に大きなコストがかかります。
そのため、将来、月面に恒久的な基地を建設する際には、人数は必要最小限に抑え、自動化できる作業については、可能な限りロボットにやってもらう、というのが基本方針となっています。
そこで、月面でロボットが自律的に移動・活動するために重要なのが「今どこにいるのか」を正確に把握する技術です。
地球上では当たり前のように使われている位置情報サービスですが、月面では事情が大きく異なります。私たちが普段スマートフォンやカーナビで利用している位置情報は、GNSS(全球測位衛星システム)によって支えられています。
GNSSの代表例としてよく知られているのが、アメリカが運用するGPSです。しかし、月の周回軌道にはこうした測位衛星が現在は存在しないため、地球と同じ方法で位置を測ることはできません。将来的に、月専用の測位衛星網が整備される計画はありますが、それには莫大なコストと時間が必要になります。また、月面基地は、洞窟内など電波の届かない場所に建設される可能性もあるため、GNSSのみでは測位システムが不十分な可能性があります。
こうした背景から、「月面では、衛星に依存しない別の測位手段が必要になる」という考えのもと、2020年、探査ハブとの共同研究のうち課題解決型テーマとして、採択されたのがカシオが提供する可視光通信技術を用いた高精度位置測位システム「picalico(ピカリコ)」でした。
可視光通信とはLEDなどの可視光を高速点滅させてデータを送受信する無線通信技術のことです。あらかじめ設置された複数のLED光源が、赤・緑・青の3色の発光パターンを変えることで、ID番号を発信します。各LED光源の座標は予めデータとして共有しているので、カメラで複数のLED光源を観測すれば、三角測量の原理によって、カメラ側は自身の位置を計算します。電波ではなく「光」を使う点が、大きな特長です。
この技術は、もともと工場や倉庫といった屋内環境での利用を想定して開発されました。フォークリフトや自動搬送車の位置管理など、すでに地上の現場で実用化されており、測位精度や安定性について一定の実績があります。
月面では、クレーターの上や基地周辺など「位置が特定できる場所」に複数のLED光源を設置し、それぞれIDと座標を紐づけておき、探査機やロボットの搭載カメラでLED光源を捉え、IDから位置を算出することが想定されています。
これまでに2回の月面を模擬した実証実験が行われており、今回の実験は3回目にあたります。
第1回の実証実験は、2021年に神奈川県相模原市で実施されました。このときは、picalicoがもともと想定していた工場内のように床が平坦な環境を前提とし、平面移動アルゴリズムを用いた2次元での位置測位が行われました。
続く第2回の実証実験は、2023年に福島県南相馬市で行われました。ここでは、実際の月面を想定し、段差や斜面といった縦方向の起伏を含む環境が用意されました。アルゴリズムを改良し、平面だけでなく、上下方向の移動を含む3次元的な動きでも測位精度を維持できるかが検証されました。
そして今回の実証実験では、これまでの技術的な検証を一歩進め、より実運用に近い条件での検証がテーマとなっています。具体的には、月面に設置する全てのLED光源を赤・緑・青の3色の発光パターンにするのではなく、一部を白色など色を変えない照明を混在させても、安定した測位が可能かどうかの検証です。
(2)白色の照明で測位ができるメリットは輸送費の削減
では、今回の実験はどのような目的で行われるのでしょうか。それは、月面基地において生活用や作業用の照明を測位にも兼用することで、月へ持ち込む専用機材をできるだけ減らし、輸送コストや物資量の削減につなげるという狙いです。
月面での活動を考えるとき、技術的な難しさと並んで常に立ちはだかるのが「コスト」の問題です。例えば、ispaceの2026年度3月期Q2の決算説明資料には、月面に物資を運ぶ単価は「1 kgあたり150万米ドル(今後は一定程度低減していくとの記載もあり)」と記載があります。そのため、100gでも重量を抑えることができれば、約2300万円の節約となります。
そのため、月面基地や探査拠点では、「できるだけ持ち込む機材を減らすこと」が重要な設計思想になります。測位システムについても同様で、位置を測るためだけの専用装置を多数設置するのは、現実的とは言えません。そこで今回の実証実験では、もう一歩踏み込んだ視点から検討が行われました。それが「作業のために設置される光を、測位にも活用できないか」という発想です。
月面基地では、工事や整備、資材の運搬といった作業が行われることが想定されています。こうした現場では、安全確保や作業効率のために、照明設備が不可欠になります。
この照明として使われる光源を測位にも利用することができれば、持ち込む必要がある測位専用のLED光源の数を減らすことができます。
今回の実証では、こうした実運用に近い状況を想定し、測位専用の光だけでなく、作業用照明が存在する環境でも、安定して位置を推定できるかどうかが検証されました。
(3)月面模擬フィールドでの実験風景および今後の展望
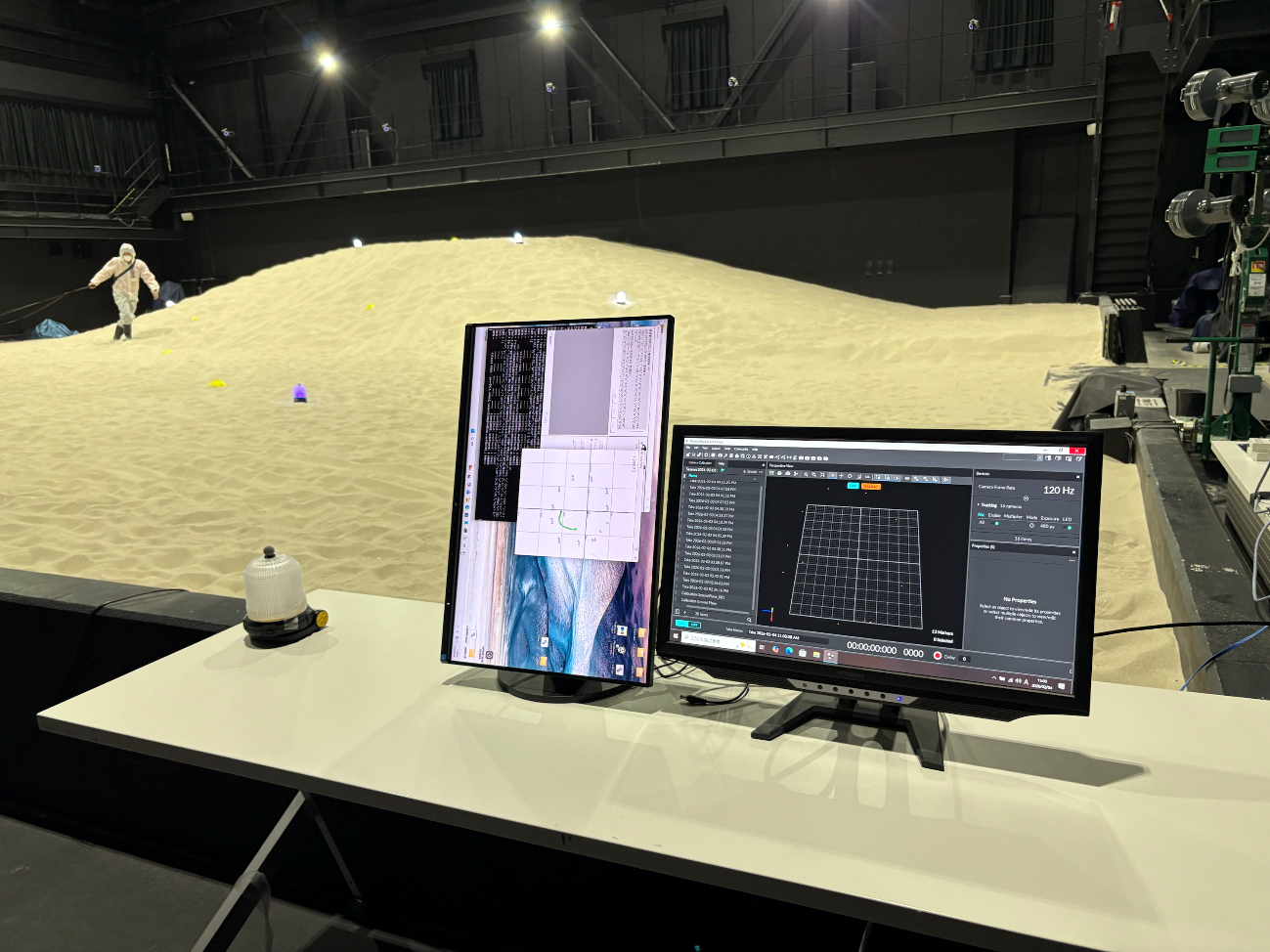
実験はJAXA相模原キャンパス内にある宇宙探査フィールドで行われました。この施設は屋内に設けられているものの、砂や礫が合計440tも敷き詰められた広大な空間となっており、屋内施設としては世界有数の規模を誇ります。

このフィールドは屋内にあり、外光を遮断して一定の照明環境下で可視光通信の実験を行うことができます。
フィールドには平地だけでなく斜面や起伏も用意されていました。月面ではローバーが常に平坦な場所を走るとは限らないため、こうした地形条件を含めて測位性能を確認することが重要になります。
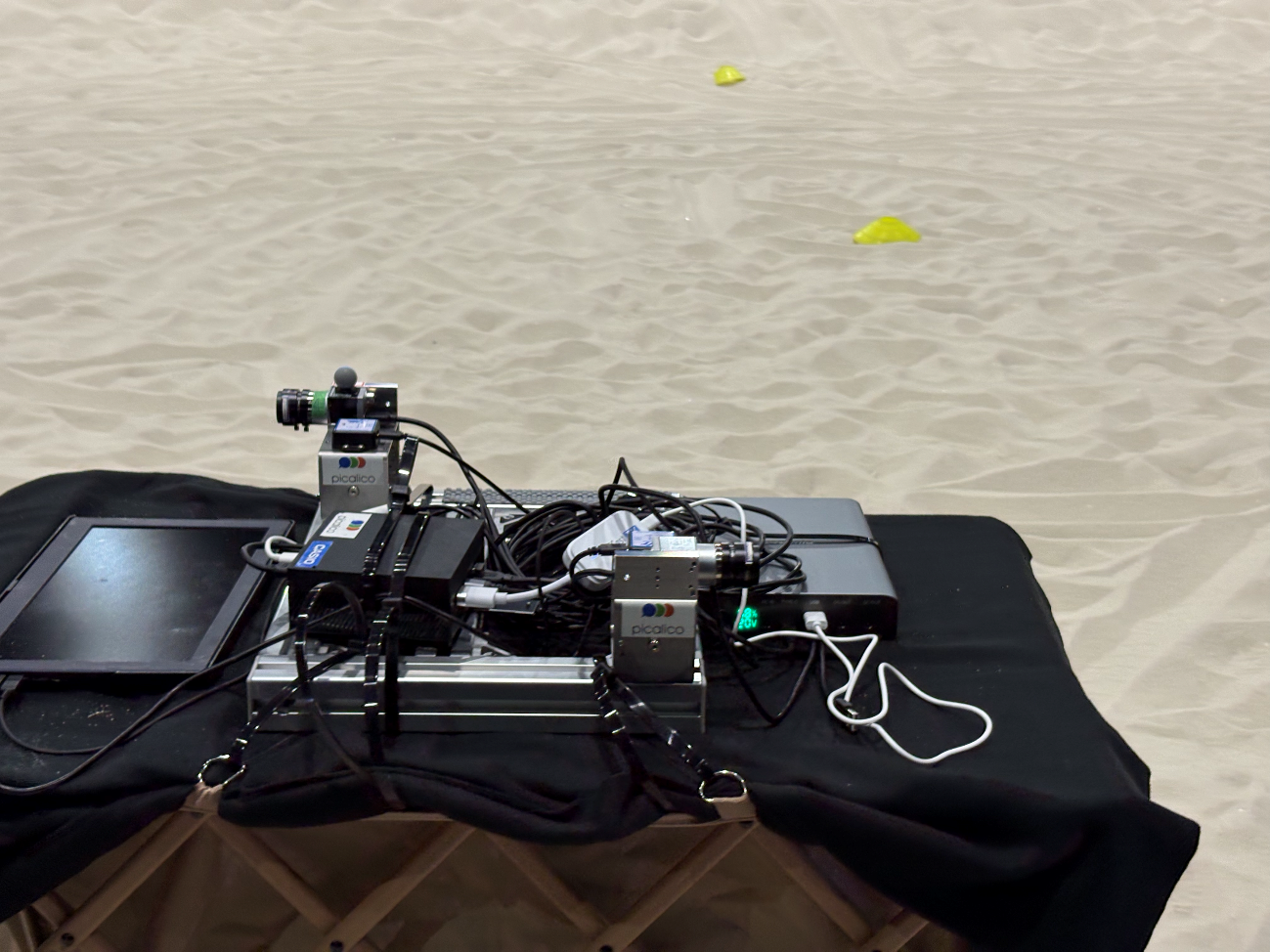
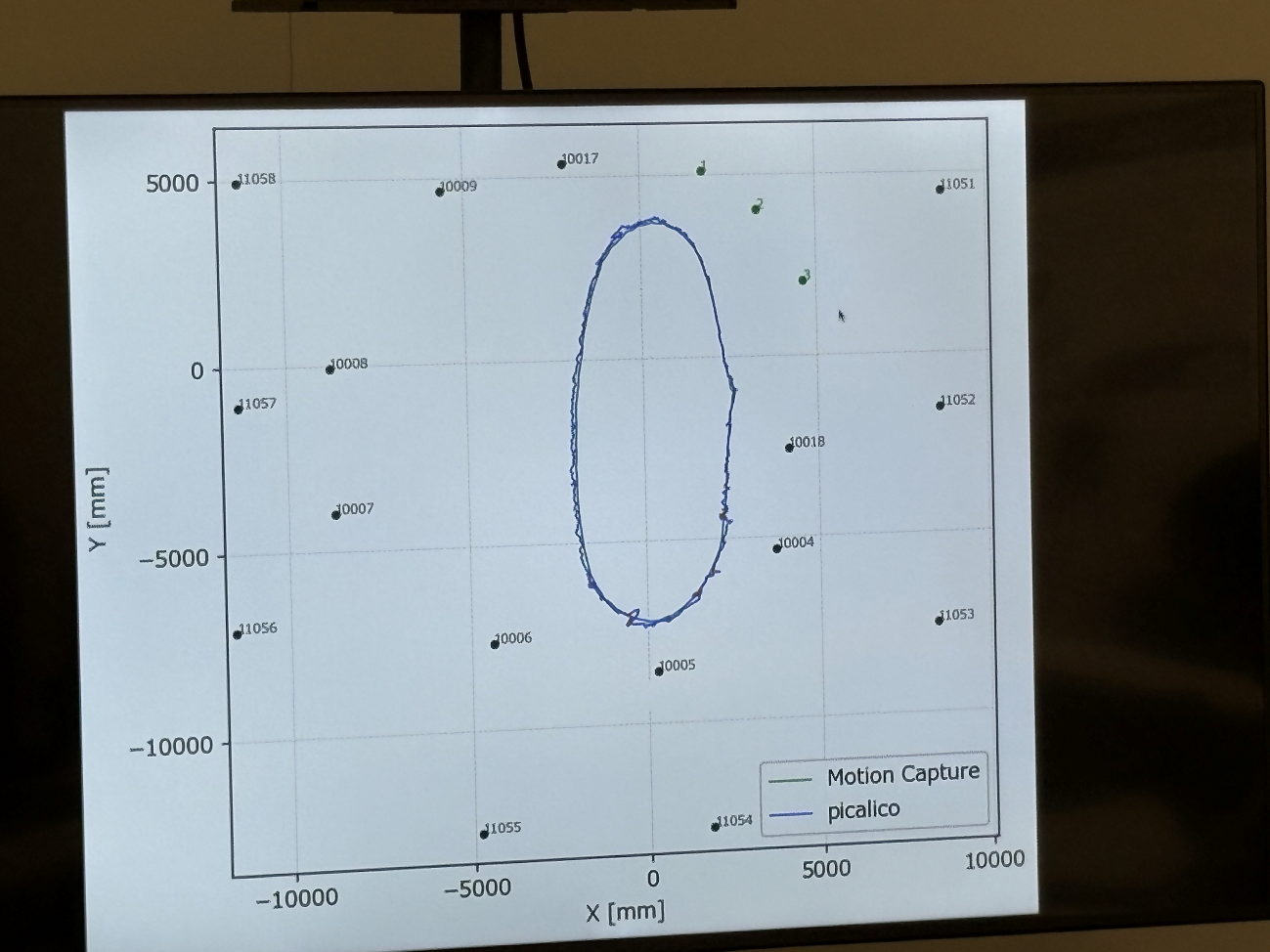
実験では、フィールド内に赤・緑・青の発光パターンのLED光源を3つ、さらに白色照明を9つが設置されていました。台車に搭載したカメラがそれらの光源を捉え、picalicoによって自己位置を推定します。台車には駆動機構がないため、作業者がロープで牽引して走行させました。推定された位置はモーションキャプチャによる参照値と比較され、軌跡がどの程度一致するかが評価されました。

picalicoは原理上、位置を算出するために最低3つの基準点が必要になります。
そのため、今回の実験では、IDを持つ赤・緑・青の発光パターンの3つのLED光源を基準として配置し、台車の出発点で必ずその3つがカメラの画角内に映るよう設計されていました。そのうえで白色照明を補助的な光源として利用し、基準点との相対的な関係から位置推定を継続できるかが検証されました。
モニター上では参照値と測位結果が重ねて表示され、平地では軌跡が概ね一致する場面が確認されました。一方で起伏のある場所では推定軌跡が不安定になる場面もあり、地形条件によって光源が十分に視野内へ入らない場合があることがうかがえました。
精度については、静止状態の測定で平均5cm程度の誤差が得られおり、移動中の精度については引き続き評価中としながらも、目標値として30cm程度が挙げられています。
JAXA側の研究代表を務める牧謙一郎助教(JAXA宇宙科学研究所 宇宙機応用工学研究系)が繰り返し語られたのは、picalicoの強みが「大規模なインフラに頼らず、比較的小さな機材で測位が成立する」という点でした。必要になるのは、カメラとLED、そして処理用のコンピューターです。いずれも特別な大型装置ではなく、将来ローバーが標準的に備える機器を活用できる可能性があることが強調されました。
また、月面には「放熱」や「光学ノイズ」といった、地上とは異なる環境であるからこその課題についても説明がありました。
月面には大気がなく、日中の気温は100度以上に達するため、機械が動作することで発生した熱をいかに効率よく放熱するかが課題となります。
また、自転周期が約4週間ある月では、低緯度地域では夜が約2週間続きます。
そのため、月面基地の建設候補地としては、比較的日照条件を確保しやすい月の南極域が注目されています。
ただし、南極域では、太陽光が低い角度から差し込むため、カメラに強い反射光が入り込みやすく、レゴリスによる反射も含めて光学ノイズが測位に影響する可能性があります。
こうした条件下でも安定して測位できるよう、光源の配置設計やカメラ仕様、アルゴリズムの改良などを積み重ねていくことが、今後の重要な検討ポイントになります。
牧助教は、今後どのような実験を行っていくのかという質問に対し、現時点ではまだ明かすことはできないと述べました。一方で、カシオの担当者と日々ディスカッションを重ねる中で、さまざまなアイデアが生まれているとも語っています。将来的には、ユーザーの要望に応じて柔軟にカスタマイズできる「picalicoシリーズ」を展開していきたいという展望も示されました。
2025年時点で策定されている国際宇宙探査シナリオでは、2050年代に月面で1000人規模の人類が活動する将来像が示されています。その実現には、まず小規模な基地建設から始め、段階的に拡張していく必要があります。
その拡張プロセスを支えるインフラの一つが測位技術です。picalicoのような局所測位システムは、基地の成長に合わせて移設・拡張しながら継続利用できる可能性があり、2050年代に人類が月面で活動することを現実のものにするための重要な技術として期待されています。